How to Use SparkFun IMU Breakout ICM-20948: Examples, Pinouts, and Specs
Introduction
The SparkFun IMU Breakout ICM-20948 is a compact and versatile inertial measurement unit (IMU) that integrates a 9-axis motion sensor. It combines a 3-axis gyroscope, a 3-axis accelerometer, and a 3-axis magnetometer into a single package, enabling precise motion tracking and orientation detection. This component is ideal for applications requiring motion sensing, such as robotics, drones, wearable devices, and gaming controllers.
Explore Projects Built with SparkFun IMU Breakout ICM-20948
Explore Projects Built with SparkFun IMU Breakout ICM-20948
Common Applications
- Robotics for motion tracking and navigation
- Drones for stabilization and orientation control
- Wearable devices for activity monitoring
- Gaming controllers for motion-based input
- Industrial equipment for vibration analysis and monitoring
Technical Specifications
The following table outlines the key technical specifications of the SparkFun IMU Breakout ICM-20948:
| Parameter | Specification |
|---|---|
| Gyroscope Range | ±250, ±500, ±1000, ±2000 dps |
| Accelerometer Range | ±2g, ±4g, ±8g, ±16g |
| Magnetometer Range | ±4900 µT |
| Operating Voltage | 1.8V (logic) / 3.3V (power supply) |
| Communication Interface | I²C (up to 400 kHz) / SPI (up to 7 MHz) |
| Operating Temperature | -40°C to +85°C |
| Dimensions | 1.0" x 1.0" (25.4mm x 25.4mm) |
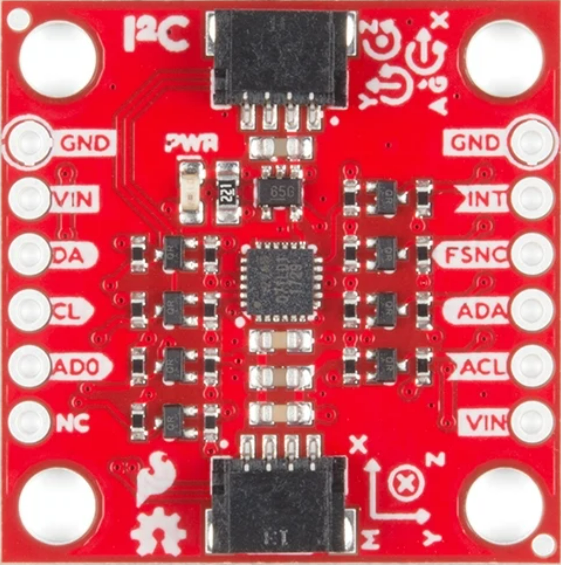
Pin Configuration and Descriptions
The SparkFun IMU Breakout ICM-20948 features the following pinout:
| Pin Name | Description |
|---|---|
| GND | Ground connection |
| 3.3V | Power supply input (3.3V) |
| SDA | I²C data line (or SPI data input in SPI mode) |
| SCL | I²C clock line (or SPI clock in SPI mode) |
| CS | Chip select for SPI communication (active low) |
| INT | Interrupt output (can be configured for motion detection or data ready) |
| RST | Reset pin (active low, used to reset the device) |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect the
3.3Vpin to a 3.3V power source and theGNDpin to ground. - Communication Interface: Choose between I²C or SPI communication:
- For I²C, connect the
SDAandSCLpins to the corresponding I²C lines on your microcontroller. - For SPI, connect the
CS,SDA(MOSI),SCL(SCK), and optionally theINTpin for interrupt handling.
- For I²C, connect the
- Pull-Up Resistors: If using I²C, ensure pull-up resistors (typically 4.7kΩ) are present on the
SDAandSCLlines. - Interrupts: Optionally, connect the
INTpin to a GPIO pin on your microcontroller to handle interrupts for motion detection or data-ready signals.
Important Considerations and Best Practices
- Voltage Levels: Ensure the logic levels of your microcontroller match the 1.8V logic level of the ICM-20948. Use a level shifter if necessary.
- Magnetometer Calibration: Perform a magnetometer calibration to account for environmental magnetic interference.
- Data Rates: Configure the data output rates appropriately to balance performance and power consumption.
- Mounting: Secure the breakout board firmly to minimize vibrations and improve measurement accuracy.
Example Code for Arduino UNO
Below is an example of how to interface the SparkFun IMU Breakout ICM-20948 with an Arduino UNO using I²C:
#include <Wire.h>
#include <SparkFun_ICM-20948_ArduinoLibrary.h> // Include the SparkFun library
ICM_20948_I2C myICM; // Create an ICM-20948 object
void setup() {
Serial.begin(115200); // Initialize serial communication
Wire.begin(); // Initialize I²C communication
// Initialize the IMU
if (myICM.begin(Wire, 0x69) != ICM_20948_Stat_Ok) {
Serial.println("IMU initialization failed!");
while (1); // Halt if initialization fails
}
Serial.println("IMU initialized successfully!");
}
void loop() {
// Check if new data is available
if (myICM.dataReady()) {
myICM.getAGMT(); // Read accelerometer, gyroscope, and magnetometer data
// Print accelerometer data
Serial.print("Accel X: ");
Serial.print(myICM.accX());
Serial.print(" Y: ");
Serial.print(myICM.accY());
Serial.print(" Z: ");
Serial.println(myICM.accZ());
// Print gyroscope data
Serial.print("Gyro X: ");
Serial.print(myICM.gyrX());
Serial.print(" Y: ");
Serial.print(myICM.gyrY());
Serial.print(" Z: ");
Serial.println(myICM.gyrZ());
// Print magnetometer data
Serial.print("Mag X: ");
Serial.print(myICM.magX());
Serial.print(" Y: ");
Serial.print(myICM.magY());
Serial.print(" Z: ");
Serial.println(myICM.magZ());
delay(100); // Delay for readability
}
}
Troubleshooting and FAQs
Common Issues
IMU Not Detected:
- Ensure the I²C address (default
0x69) matches the configuration in your code. - Verify the
SDAandSCLconnections and check for proper pull-up resistors. - Confirm the power supply voltage is 3.3V.
- Ensure the I²C address (default
Incorrect or No Data:
- Check for loose or incorrect wiring.
- Ensure the IMU is properly mounted to avoid excessive vibrations.
- Perform a magnetometer calibration if magnetic readings are inaccurate.
Interrupts Not Triggering:
- Verify the
INTpin is connected to a GPIO pin on your microcontroller. - Check the interrupt configuration in your code.
- Verify the
Solutions and Tips
- Use a logic level shifter if your microcontroller operates at 5V logic levels.
- For SPI communication, ensure the
CSpin is correctly configured and pulled low during communication. - Refer to the SparkFun ICM-20948 datasheet for advanced configuration options and register settings.
By following this documentation, you can effectively integrate the SparkFun IMU Breakout ICM-20948 into your projects for precise motion sensing and orientation tracking.