How to Use Stepper Motor 2: Examples, Pinouts, and Specs
Introduction
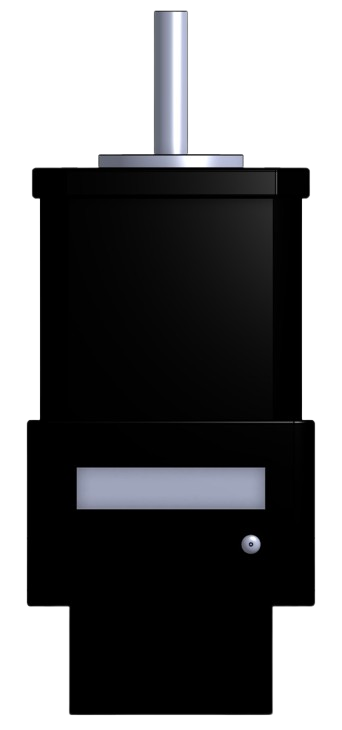
The Stepper Motor 2 (STP-MTRD-17038E), manufactured by Automation Direct, is a high-performance stepper motor designed for precise control of angular position and speed. Unlike traditional DC motors, stepper motors divide a full rotation into a large number of discrete steps, making them ideal for applications requiring accurate positioning and repeatable motion.
Explore Projects Built with Stepper Motor 2
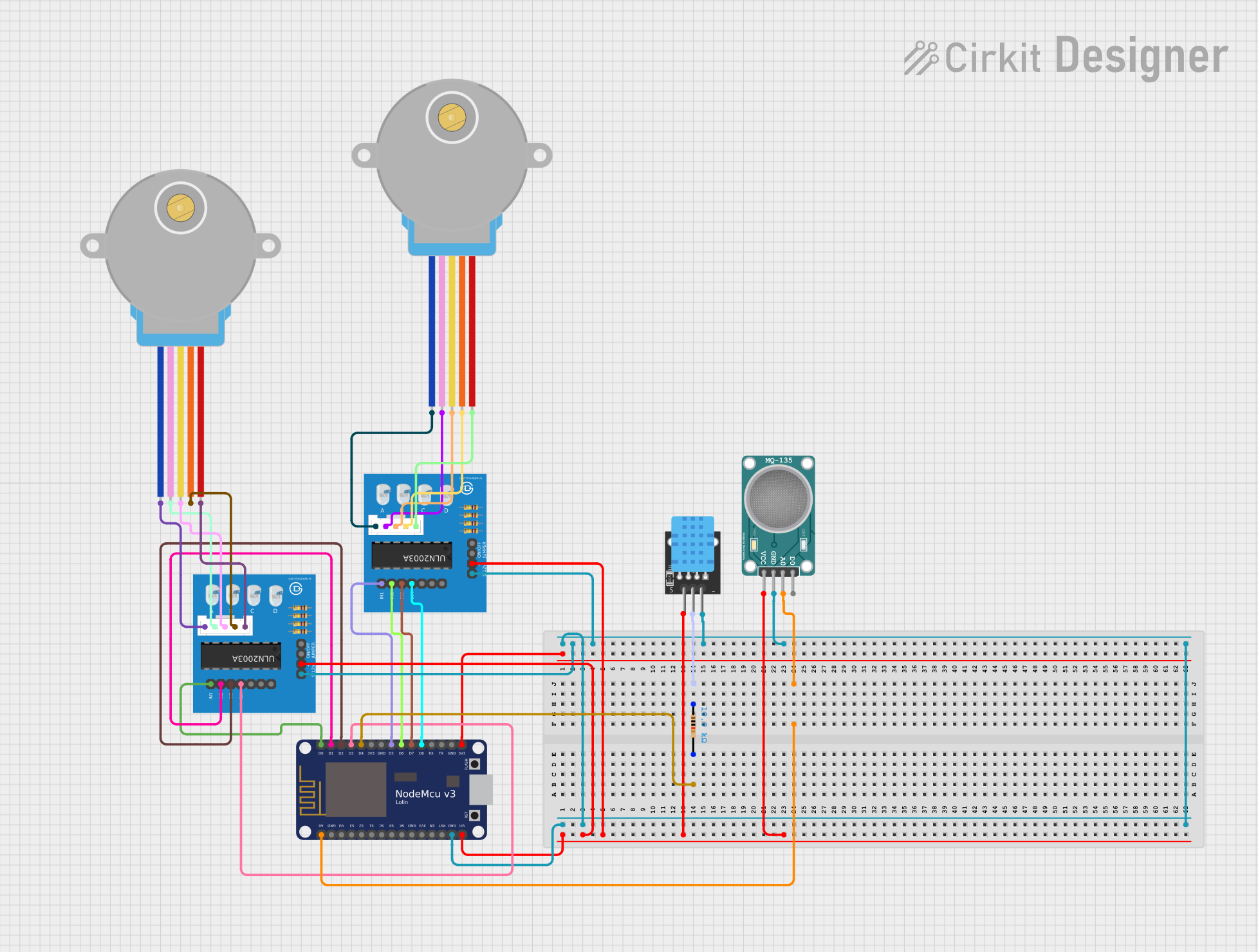
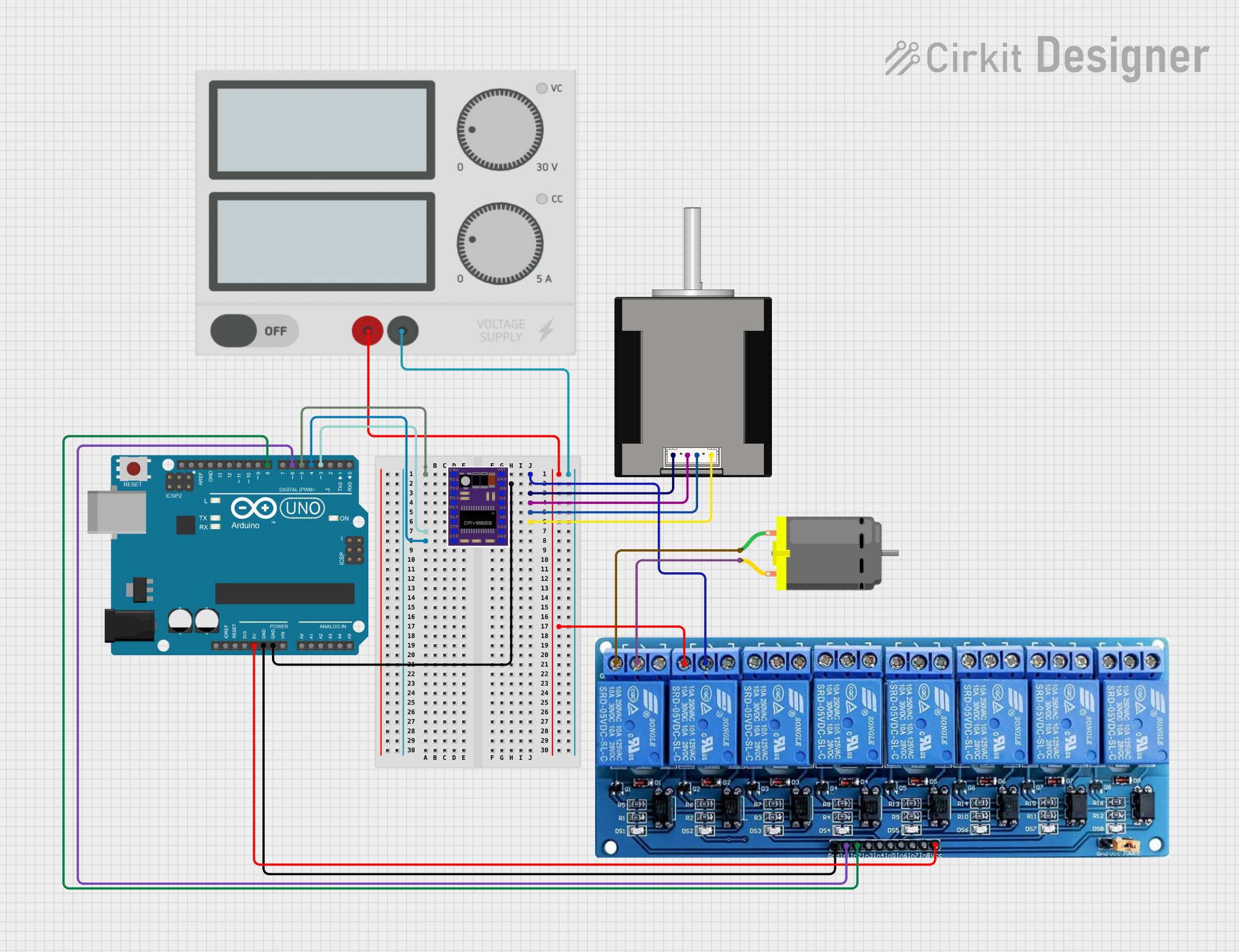
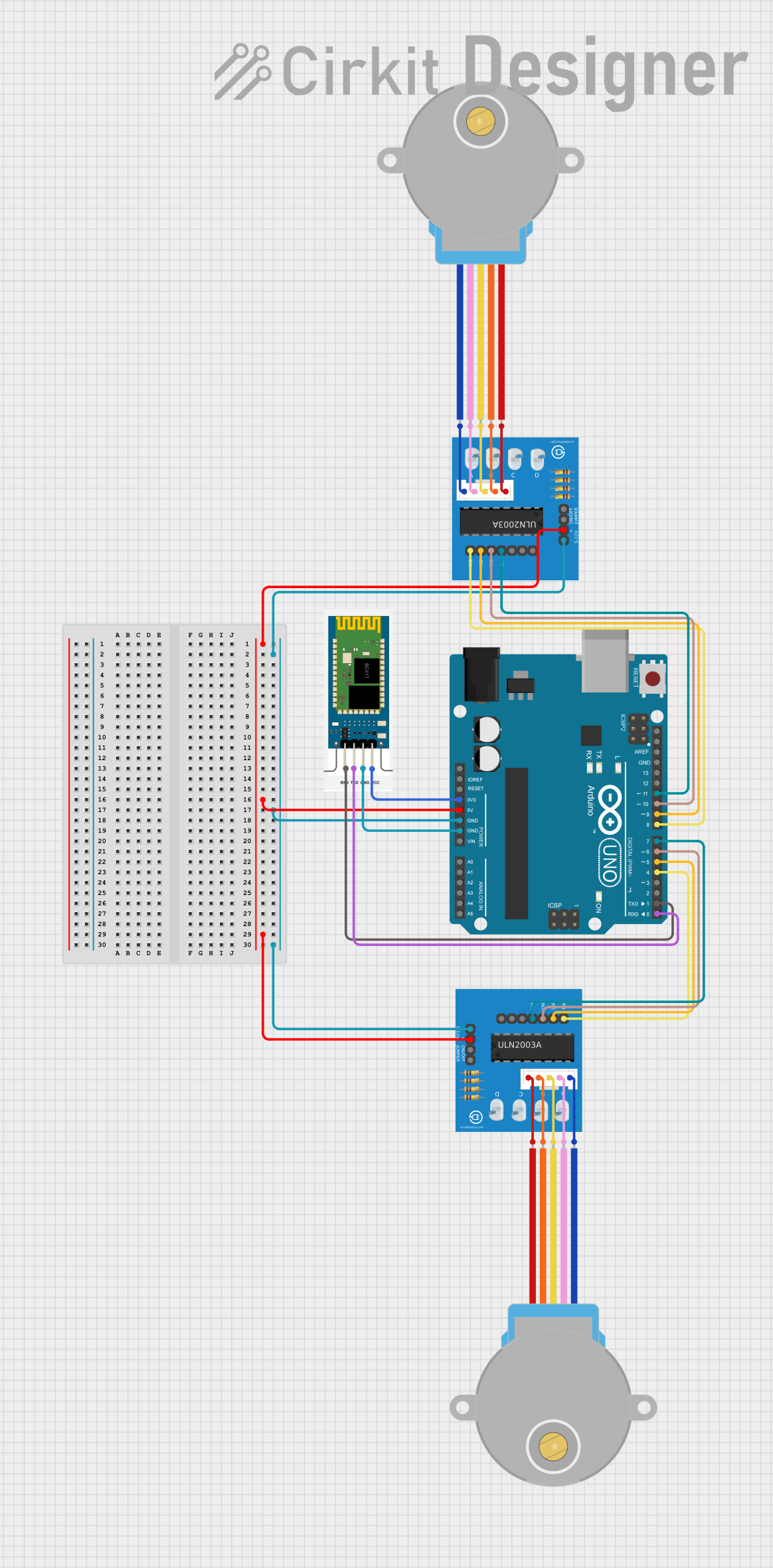
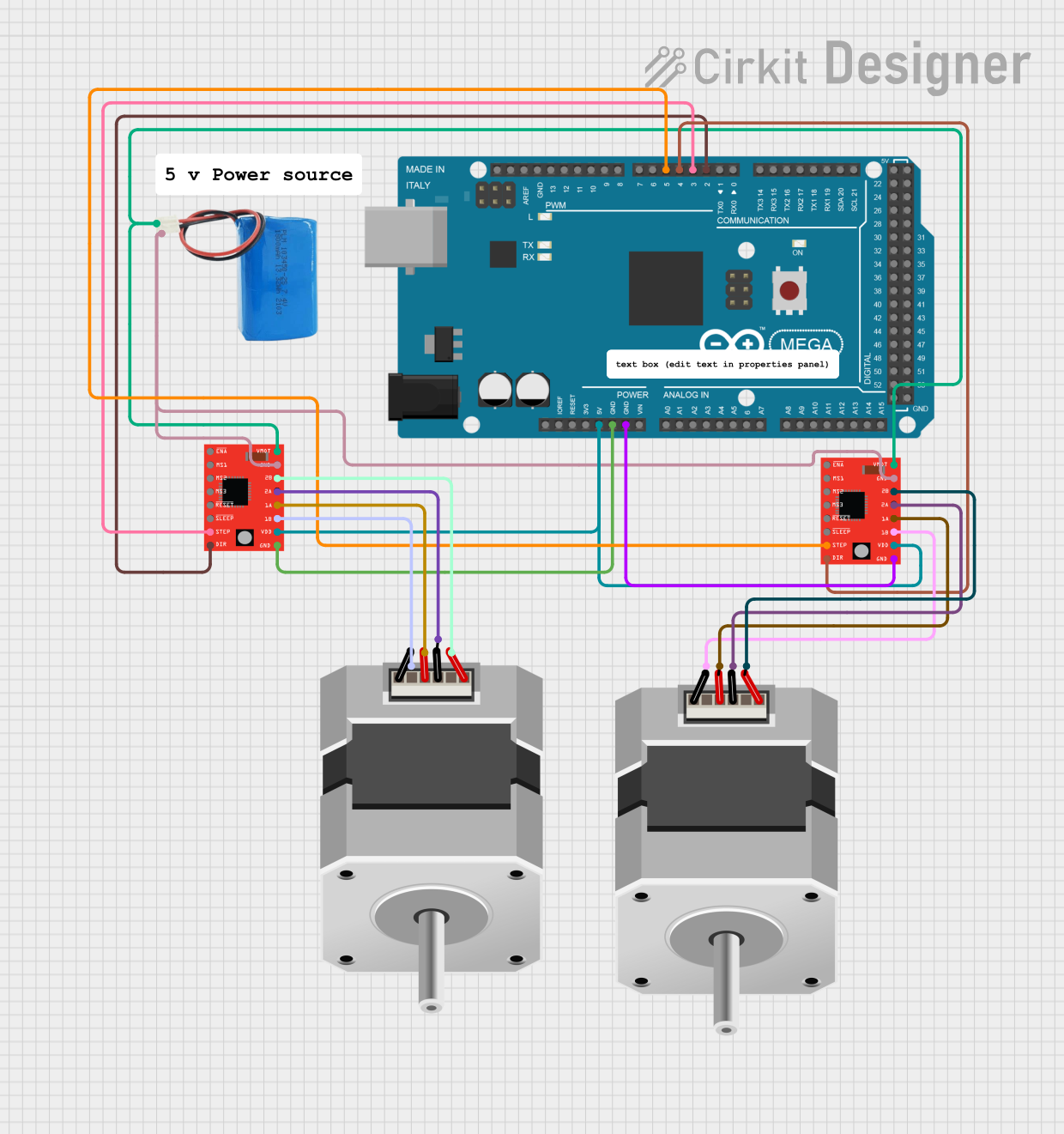
Explore Projects Built with Stepper Motor 2
Common Applications and Use Cases
- 3D Printers: For precise movement of print heads and platforms.
- CNC Machines: For accurate control of cutting tools and workpieces.
- Robotics: For controlling joint movements and actuators.
- Automated Systems: Used in conveyor belts, pick-and-place machines, and more.
- Camera Gimbals: For smooth and precise camera positioning.
Technical Specifications
The following table outlines the key technical details of the STP-MTRD-17038E stepper motor:
| Parameter | Value |
|---|---|
| Manufacturer | Automation Direct |
| Part Number | STP-MTRD-17038E |
| Step Angle | 1.8° per step |
| Holding Torque | 1.26 Nm (178 oz-in) |
| Rated Current per Phase | 2.8 A |
| Voltage | 2.55 V |
| Resistance per Phase | 0.91 Ω |
| Inductance per Phase | 3.6 mH |
| Number of Leads | 4 |
| Shaft Diameter | 6.35 mm (0.25 in) |
| Motor Frame Size | NEMA 17 |
| Weight | 0.5 kg (1.1 lbs) |
Pin Configuration and Descriptions
The STP-MTRD-17038E is a 4-wire bipolar stepper motor. The pinout is as follows:
| Wire Color | Function | Description |
|---|---|---|
| Red | Coil A+ | Positive terminal of Coil A |
| Blue | Coil A- | Negative terminal of Coil A |
| Green | Coil B+ | Positive terminal of Coil B |
| Black | Coil B- | Negative terminal of Coil B |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Ensure the motor is powered by a suitable stepper motor driver capable of handling the rated current (2.8 A per phase) and voltage (2.55 V).
- Driver Connection: Connect the motor's wires to the stepper motor driver as follows:
- Red and Blue wires to Coil A terminals.
- Green and Black wires to Coil B terminals.
- Microcontroller Interface: Use a microcontroller (e.g., Arduino UNO) to send step and direction signals to the stepper motor driver.
- Step Angle Control: Adjust the step angle by configuring the driver for full-step, half-step, or microstepping modes.
Important Considerations and Best Practices
- Current Limiting: Set the current limit on the stepper motor driver to 2.8 A to prevent overheating.
- Heat Dissipation: Use a heatsink or cooling fan if the motor operates continuously at high loads.
- Power Supply: Use a power supply with sufficient current capacity to handle the motor and driver.
- Wiring: Ensure secure and proper connections to avoid missteps or damage to the motor.
Example Code for Arduino UNO
Below is an example of how to control the STP-MTRD-17038E using an Arduino UNO and a stepper motor driver:
// Include the Arduino Stepper library
#include <Stepper.h>
// Define the number of steps per revolution (360° / 1.8° = 200 steps)
#define STEPS_PER_REV 200
// Initialize the stepper motor object
// Pins 8, 9, 10, and 11 are connected to the driver inputs
Stepper stepperMotor(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
// Set the motor speed (in RPM)
stepperMotor.setSpeed(60); // 60 RPM
// Initialize serial communication for debugging
Serial.begin(9600);
Serial.println("Stepper Motor Test");
}
void loop() {
// Rotate the motor 1 full revolution clockwise
Serial.println("Rotating clockwise...");
stepperMotor.step(STEPS_PER_REV);
delay(1000); // Wait for 1 second
// Rotate the motor 1 full revolution counterclockwise
Serial.println("Rotating counterclockwise...");
stepperMotor.step(-STEPS_PER_REV);
delay(1000); // Wait for 1 second
}
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Moving:
- Cause: Incorrect wiring or loose connections.
- Solution: Double-check the wiring and ensure all connections are secure.
Motor Overheating:
- Cause: Current limit set too high on the driver.
- Solution: Adjust the current limit to 2.8 A or lower.
Skipping Steps:
- Cause: Insufficient torque or incorrect step signal timing.
- Solution: Reduce the load on the motor or increase the step pulse frequency.
Vibrations or Noise:
- Cause: Operating in full-step mode or resonance at certain speeds.
- Solution: Use microstepping to reduce vibrations and noise.
FAQs
Q: Can I use a higher voltage power supply?
A: Yes, but ensure the stepper driver regulates the voltage to the motor's rated voltage (2.55 V) and limits the current to 2.8 A.Q: What is the maximum speed of the motor?
A: The maximum speed depends on the driver, power supply, and load. Typically, stepper motors can achieve speeds up to 1000 RPM with proper tuning.Q: Can I use this motor with a unipolar driver?
A: No, the STP-MTRD-17038E is a bipolar stepper motor and requires a bipolar driver.
By following this documentation, users can effectively integrate the STP-MTRD-17038E stepper motor into their projects for precise and reliable motion control.