How to Use DFRobot C4001 mmWave Presence Sensor 25m: Examples, Pinouts, and Specs
Introduction
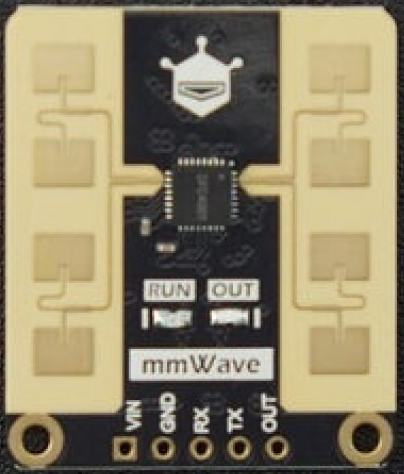
The DFRobot C4001 mmWave Presence Sensor 25m is a high-precision sensor designed to detect the presence of objects or people using millimeter-wave (mmWave) technology. With a detection range of up to 25 meters, this sensor is ideal for applications requiring accurate and reliable presence detection. Its compact design and robust performance make it suitable for use in security systems, smart home automation, industrial monitoring, and more.
Explore Projects Built with DFRobot C4001 mmWave Presence Sensor 25m
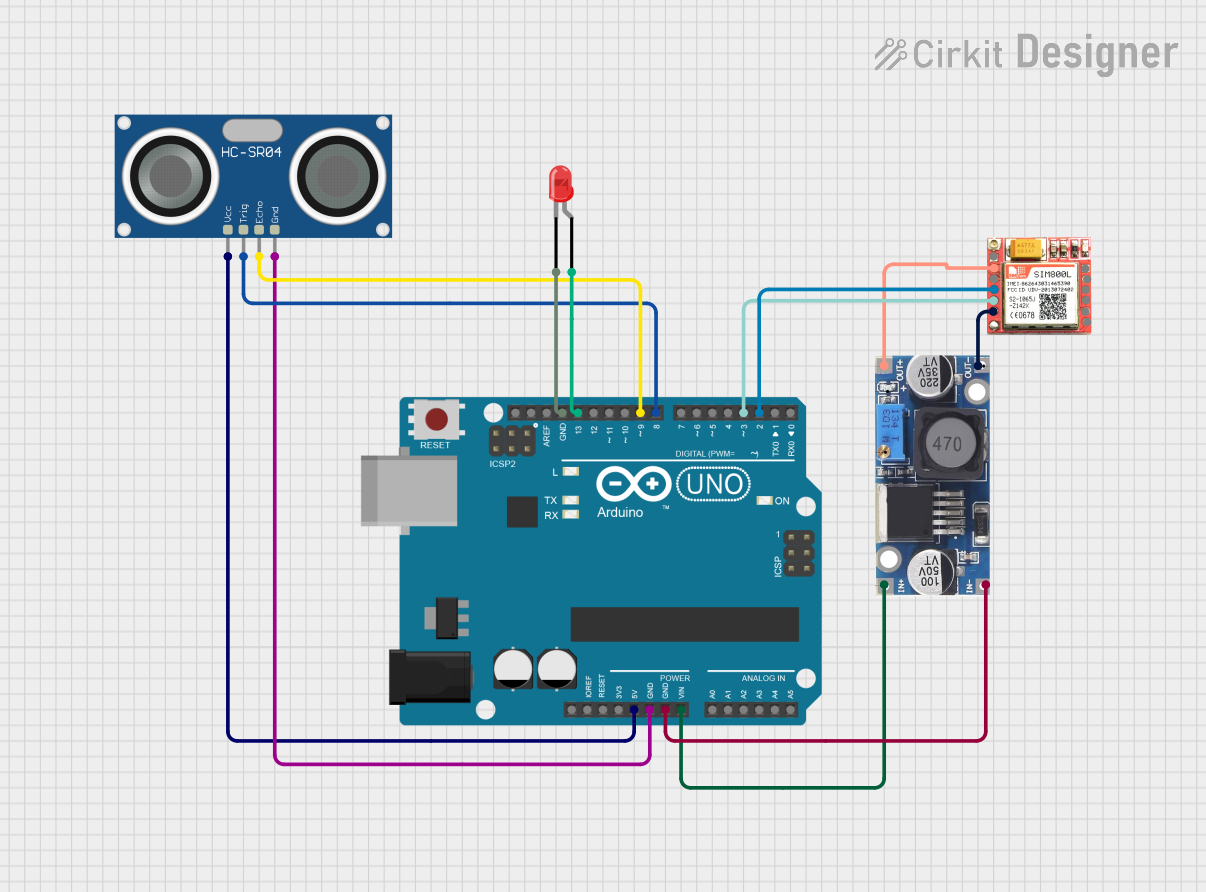
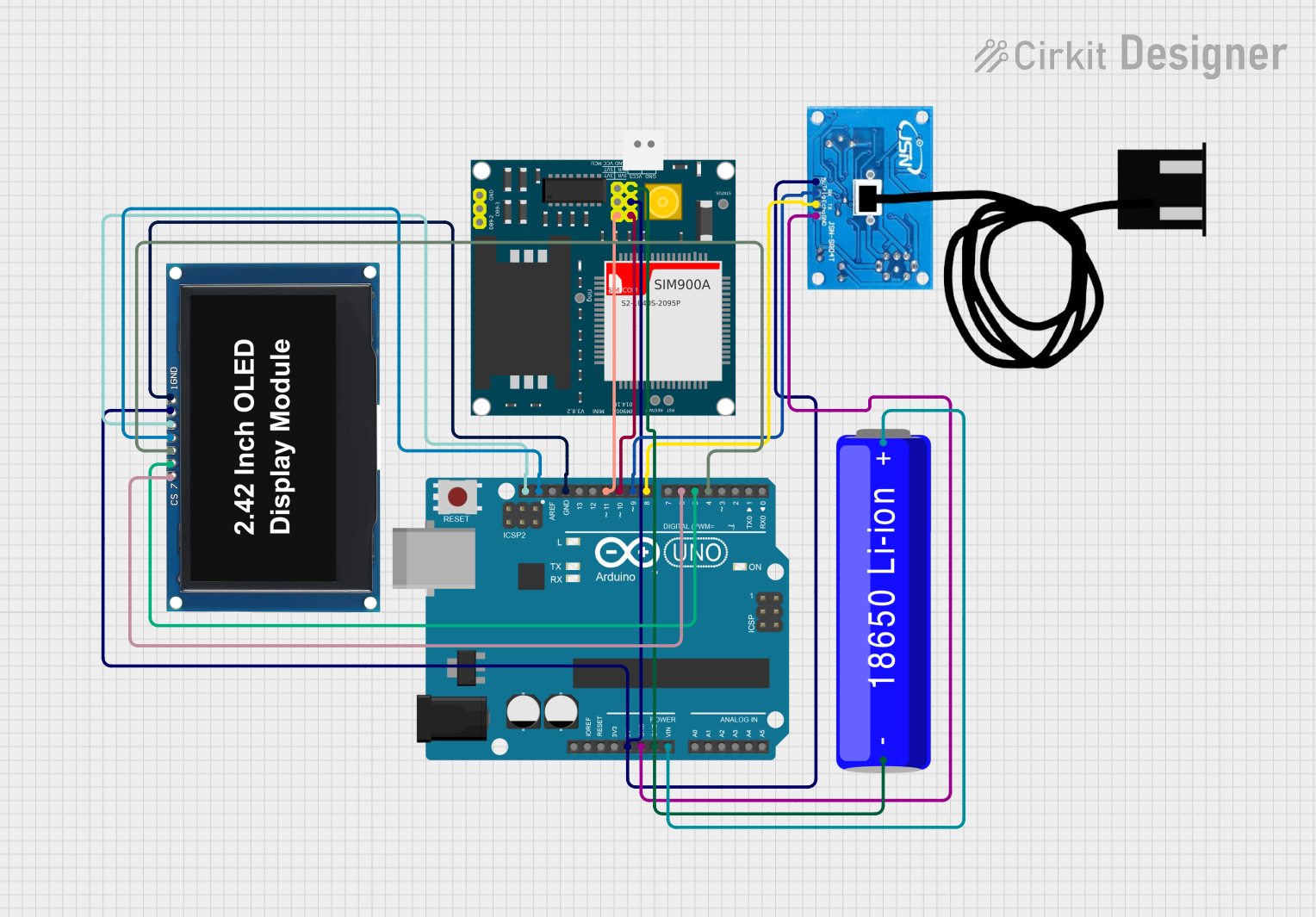
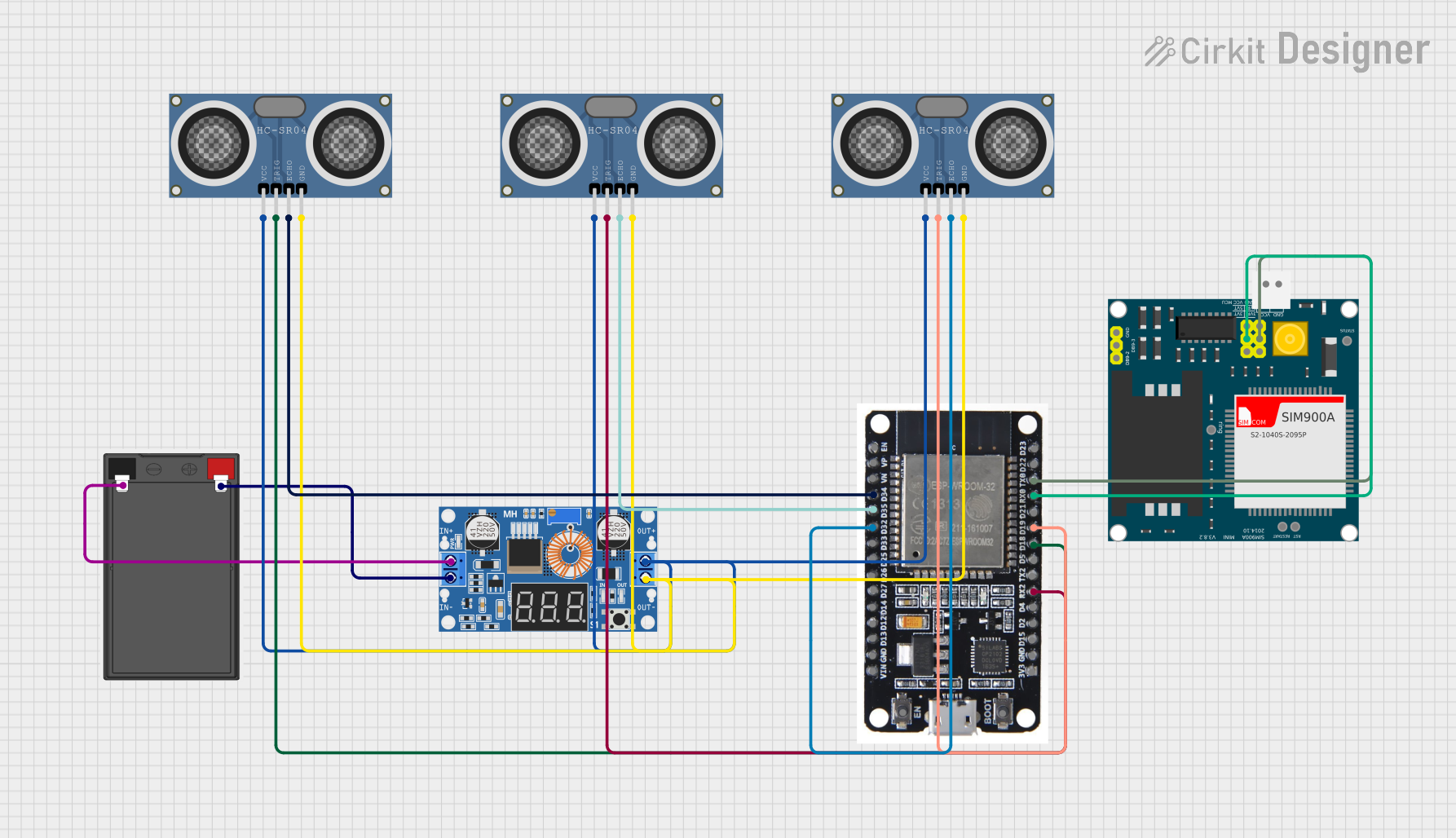
Explore Projects Built with DFRobot C4001 mmWave Presence Sensor 25m
Common Applications
- Security systems for motion and presence detection
- Smart home automation (e.g., lighting and HVAC control)
- Industrial monitoring and safety systems
- Retail and public space occupancy monitoring
- Robotics and autonomous systems
Technical Specifications
The following table outlines the key technical specifications of the DFRobot C4001 mmWave Presence Sensor 25m:
| Parameter | Specification |
|---|---|
| Detection Range | Up to 25 meters |
| Operating Frequency | 24 GHz |
| Operating Voltage | 5V DC |
| Operating Current | ≤ 100 mA |
| Communication Interface | UART (3.3V TTL) |
| Detection Angle | Horizontal: 120°, Vertical: 30° |
| Operating Temperature | -40°C to 85°C |
| Dimensions | 30mm x 20mm x 5mm |
Pin Configuration
The DFRobot C4001 sensor has a 4-pin interface. The pin configuration is as follows:
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (5V DC) |
| 2 | GND | Ground |
| 3 | TX | UART Transmit (3.3V TTL) |
| 4 | RX | UART Receive (3.3V TTL) |
Usage Instructions
Connecting the Sensor
To use the DFRobot C4001 mmWave Presence Sensor, follow these steps:
- Power the Sensor: Connect the
VCCpin to a 5V DC power source and theGNDpin to ground. - Establish Communication: Connect the
TXpin of the sensor to theRXpin of your microcontroller (e.g., Arduino UNO) and theRXpin of the sensor to theTXpin of the microcontroller. - Configure the UART Interface: Set the UART baud rate to 115200 bps for communication with the sensor.
Example Arduino Code
Below is an example of how to interface the DFRobot C4001 sensor with an Arduino UNO:
// Include necessary libraries
#include <SoftwareSerial.h>
// Define the RX and TX pins for SoftwareSerial
SoftwareSerial mmWaveSerial(2, 3); // RX = Pin 2, TX = Pin 3
void setup() {
// Initialize serial communication
Serial.begin(9600); // For debugging via Serial Monitor
mmWaveSerial.begin(115200); // Communication with the sensor
Serial.println("DFRobot C4001 mmWave Sensor Initialized");
}
void loop() {
// Check if data is available from the sensor
if (mmWaveSerial.available()) {
String sensorData = mmWaveSerial.readString(); // Read sensor data
Serial.println("Sensor Data: " + sensorData); // Print data to Serial Monitor
}
delay(100); // Small delay to avoid flooding the Serial Monitor
}
Important Considerations
- Ensure the sensor is mounted in a location free from obstructions for optimal performance.
- Avoid placing the sensor near strong electromagnetic interference (EMI) sources.
- The sensor operates at 3.3V TTL levels for UART communication. Use a level shifter if interfacing with 5V logic devices.
- The detection range and accuracy may vary depending on environmental conditions such as temperature, humidity, and the presence of reflective surfaces.
Troubleshooting and FAQs
Common Issues and Solutions
No Data Received from the Sensor
- Ensure the sensor is powered correctly (5V DC to
VCCandGNDconnected). - Verify the UART connections (
TXtoRXandRXtoTX). - Check that the UART baud rate is set to 115200 bps.
- Ensure the sensor is powered correctly (5V DC to
Inconsistent or Erratic Readings
- Ensure the sensor is not obstructed by objects or placed near reflective surfaces.
- Verify that the sensor is operating within the specified temperature range (-40°C to 85°C).
- Check for sources of electromagnetic interference (EMI) near the sensor.
Sensor Not Detected by Microcontroller
- Confirm that the microcontroller's UART pins are functioning correctly.
- If using an Arduino UNO, ensure the SoftwareSerial library is properly configured.
FAQs
Q: Can the sensor detect multiple objects simultaneously?
A: The DFRobot C4001 is optimized for presence detection and may not distinguish between multiple objects. For advanced object tracking, additional processing may be required.
Q: Is the sensor waterproof?
A: No, the sensor is not waterproof. It should be used in environments free from moisture or enclosed in a protective housing.
Q: Can the sensor be used outdoors?
A: Yes, the sensor can operate outdoors, but it should be protected from direct exposure to rain or extreme environmental conditions.
Q: What is the maximum detection angle?
A: The sensor has a horizontal detection angle of 120° and a vertical detection angle of 30°.
By following this documentation, users can effectively integrate the DFRobot C4001 mmWave Presence Sensor 25m into their projects for reliable and accurate presence detection.