How to Use DC motor: Examples, Pinouts, and Specs

Introduction
A DC motor is an electromechanical device that converts direct current (DC) electrical energy into mechanical energy, enabling rotational motion. It operates based on the principle of electromagnetic induction, where a magnetic field interacts with current-carrying conductors to produce torque. DC motors are widely used in applications such as robotics, fans, conveyor belts, and electric vehicles due to their simplicity, reliability, and ease of control.
Explore Projects Built with DC motor
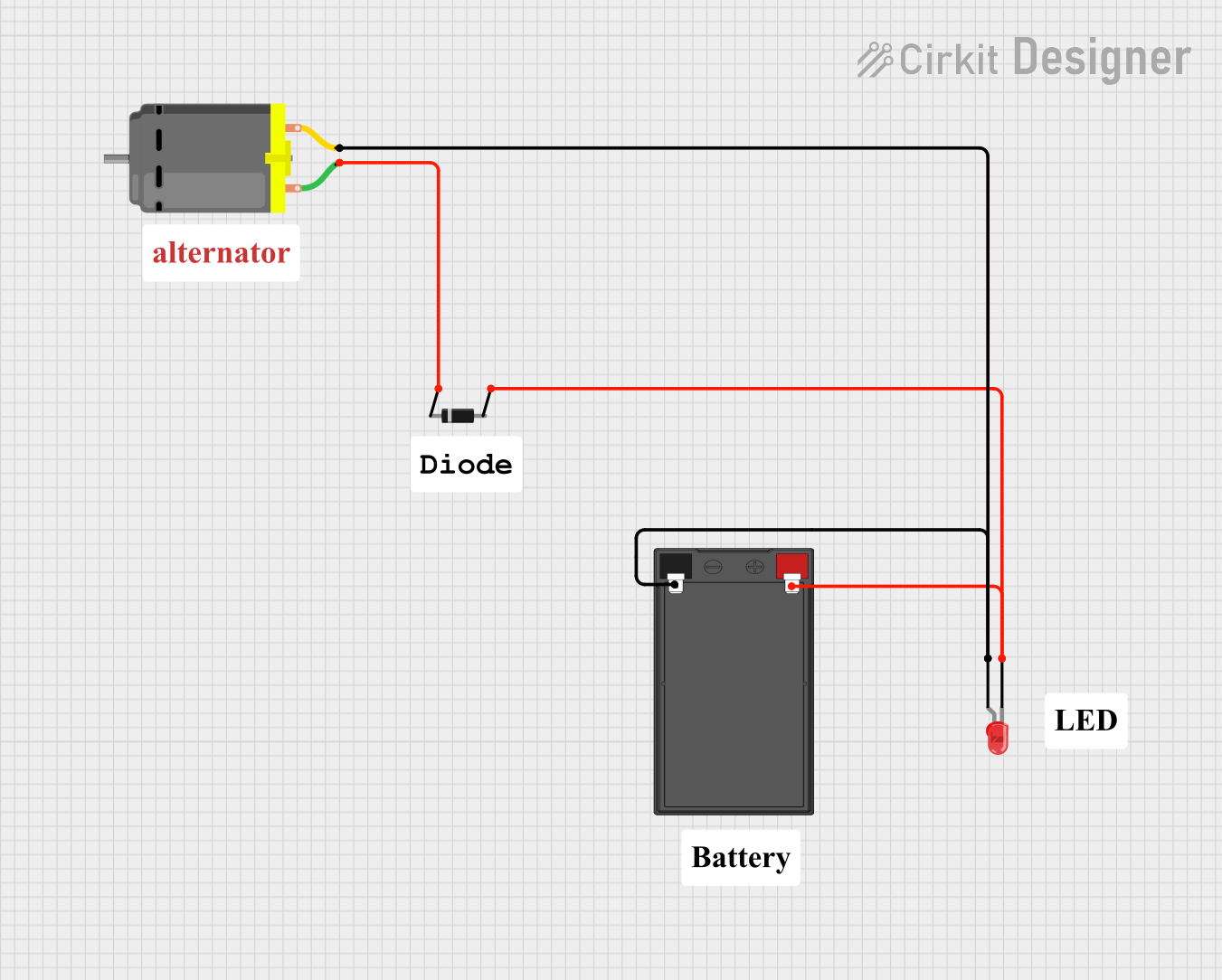


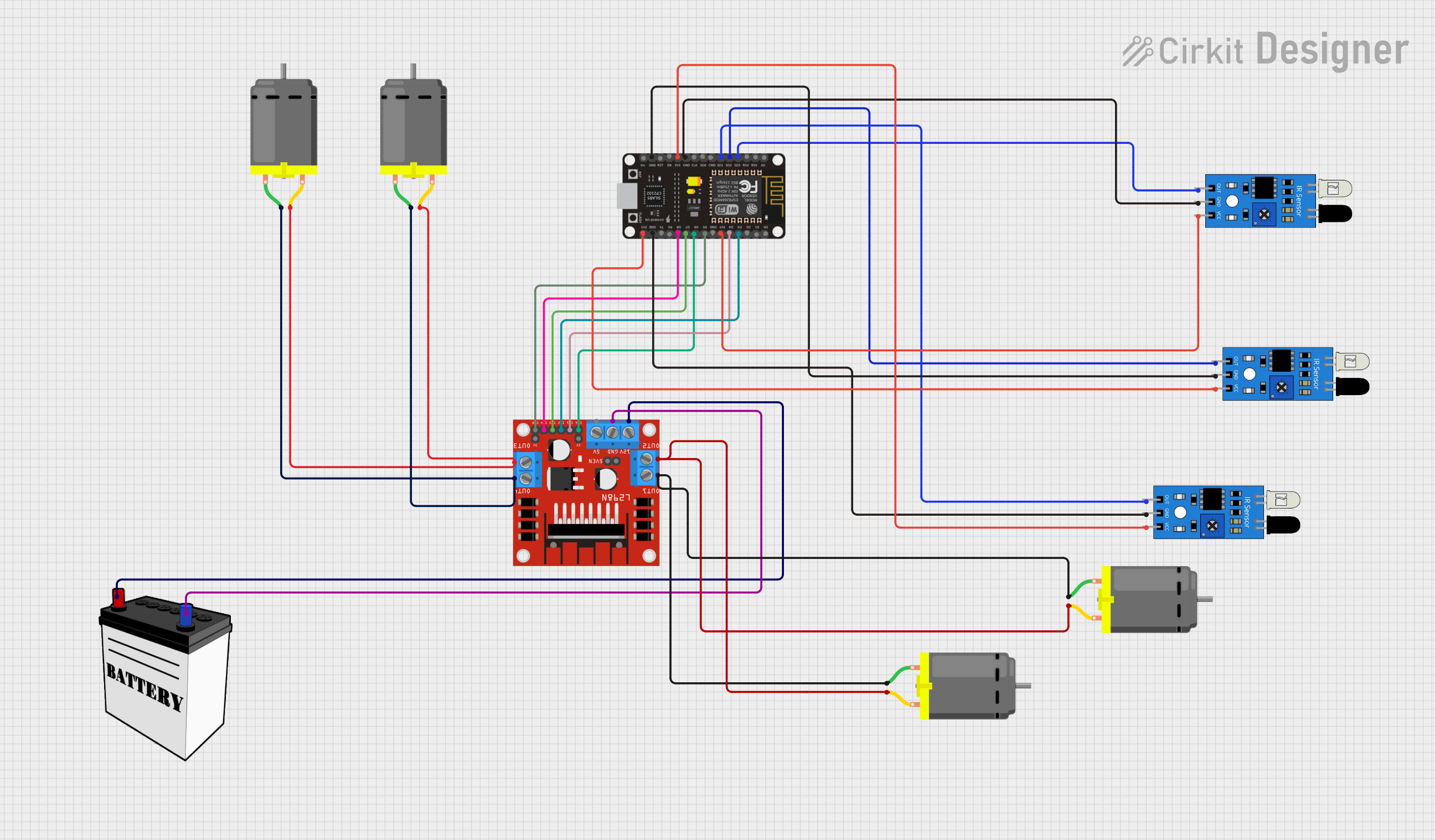
Explore Projects Built with DC motor
Common Applications:
- Robotics: For driving wheels, arms, or other moving parts.
- Fans and Blowers: To generate airflow in cooling systems.
- Electric Vehicles: For propulsion systems.
- Conveyor Belts: To move materials in industrial settings.
- Home Appliances: Such as mixers, drills, and toys.
Technical Specifications
Below are the general technical specifications for a typical DC motor. Note that actual values may vary depending on the specific model and manufacturer.
Key Specifications:
- Operating Voltage: 3V to 24V (varies by model)
- Current Rating: 100mA to 2A (depending on load and motor size)
- Speed: 1000 to 10,000 RPM (Revolutions Per Minute)
- Torque: 0.1 to 10 N·m (Newton-meters)
- Power Output: 0.1W to 100W
- Motor Type: Brushed or Brushless DC Motor
Pin Configuration and Descriptions:
For a basic brushed DC motor, there are typically two terminals:
| Pin | Description |
|---|---|
| + | Positive terminal for power input |
| - | Negative terminal for power input |
For a brushless DC motor (BLDC), there may be additional wires for control and feedback:
| Pin | Description |
|---|---|
| U | Phase U connection |
| V | Phase V connection |
| W | Phase W connection |
| Hall A | Hall sensor output A (feedback) |
| Hall B | Hall sensor output B (feedback) |
| Hall C | Hall sensor output C (feedback) |
Usage Instructions
How to Use a DC Motor in a Circuit:
- Power Supply: Connect the motor terminals to a DC power source. Ensure the voltage matches the motor's rated voltage.
- Direction Control: Use an H-bridge circuit or motor driver IC (e.g., L298N) to control the direction of rotation.
- Speed Control: Implement Pulse Width Modulation (PWM) using a microcontroller (e.g., Arduino) to adjust the motor speed.
- Load Considerations: Avoid overloading the motor to prevent overheating or damage.
Important Considerations:
- Voltage Matching: Always operate the motor within its rated voltage range.
- Current Limiting: Use a current-limiting resistor or motor driver to prevent excessive current draw.
- Heat Dissipation: Ensure proper ventilation or heat sinks to manage heat generated during operation.
- Noise Suppression: Add capacitors across the motor terminals to reduce electrical noise.
Example: Controlling a DC Motor with Arduino UNO
Below is an example of how to control a DC motor using an Arduino UNO and an L298N motor driver.
Circuit Connections:
- Connect the motor terminals to the L298N motor driver outputs (OUT1 and OUT2).
- Connect the L298N input pins (IN1 and IN2) to Arduino digital pins 9 and 10.
- Connect the L298N enable pin (ENA) to Arduino PWM pin 3.
- Provide a suitable power supply to the motor driver and motor.
Arduino Code:
// Define motor control pins
const int IN1 = 9; // Motor driver input 1
const int IN2 = 10; // Motor driver input 2
const int ENA = 3; // Motor driver enable pin (PWM)
// Setup function to initialize pins
void setup() {
pinMode(IN1, OUTPUT); // Set IN1 as output
pinMode(IN2, OUTPUT); // Set IN2 as output
pinMode(ENA, OUTPUT); // Set ENA as output
}
// Loop function to control motor
void loop() {
// Rotate motor clockwise
digitalWrite(IN1, HIGH); // Set IN1 high
digitalWrite(IN2, LOW); // Set IN2 low
analogWrite(ENA, 128); // Set speed to 50% (PWM value: 128)
delay(2000); // Run motor for 2 seconds
// Rotate motor counterclockwise
digitalWrite(IN1, LOW); // Set IN1 low
digitalWrite(IN2, HIGH); // Set IN2 high
analogWrite(ENA, 128); // Maintain speed at 50%
delay(2000); // Run motor for 2 seconds
// Stop motor
digitalWrite(IN1, LOW); // Set IN1 low
digitalWrite(IN2, LOW); // Set IN2 low
analogWrite(ENA, 0); // Set speed to 0 (stop motor)
delay(2000); // Wait for 2 seconds before repeating
}
Best Practices:
- Use a flyback diode across the motor terminals to protect the circuit from voltage spikes.
- Test the motor with no load before integrating it into your application.
- Regularly inspect the motor for wear and tear, especially in brushed motors.
Troubleshooting and FAQs
Common Issues:
Motor Does Not Spin:
- Check the power supply voltage and connections.
- Verify that the motor driver or H-bridge is functioning correctly.
- Ensure the motor is not overloaded or mechanically jammed.
Motor Spins in the Wrong Direction:
- Reverse the polarity of the motor terminals.
- Adjust the control signals (e.g., IN1 and IN2) in your circuit.
Motor Overheats:
- Reduce the load on the motor.
- Ensure proper ventilation or cooling mechanisms.
- Check for excessive current draw and adjust the power supply accordingly.
Motor Produces Noise or Vibrations:
- Add capacitors across the motor terminals to suppress electrical noise.
- Inspect the motor for mechanical imbalances or loose components.
FAQs:
Q: Can I power a DC motor directly from an Arduino?
A: No, the Arduino cannot supply enough current to drive a DC motor. Use a motor driver or external power supply.Q: How do I control the speed of a DC motor?
A: Use PWM (Pulse Width Modulation) to vary the voltage supplied to the motor.Q: What is the difference between brushed and brushless DC motors?
A: Brushed motors use physical brushes for commutation, while brushless motors use electronic commutation, making them more efficient and durable.Q: Can I run a DC motor in reverse?
A: Yes, by reversing the polarity of the power supply or using an H-bridge circuit.
This concludes the documentation for the DC motor.