How to Use QMC5883L: Examples, Pinouts, and Specs
Introduction
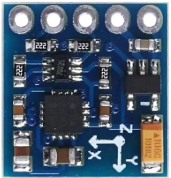
The QMC5883L, manufactured by QST, is a digital compass sensor designed to measure magnetic fields in three dimensions (X, Y, and Z axes). It provides precise heading information, making it an essential component in navigation systems, robotics, and mobile devices. With its compact size and I2C interface, the QMC5883L is easy to integrate into a wide range of applications.
Explore Projects Built with QMC5883L
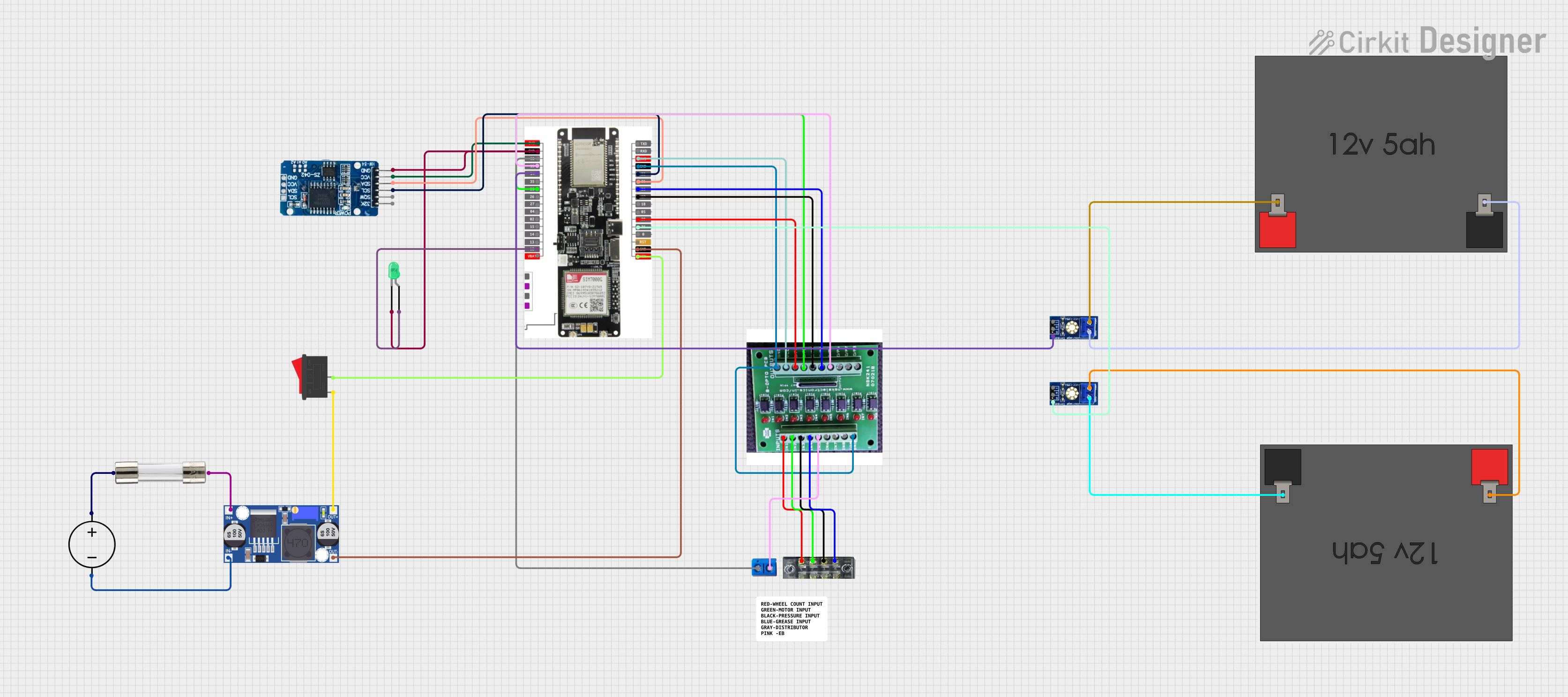
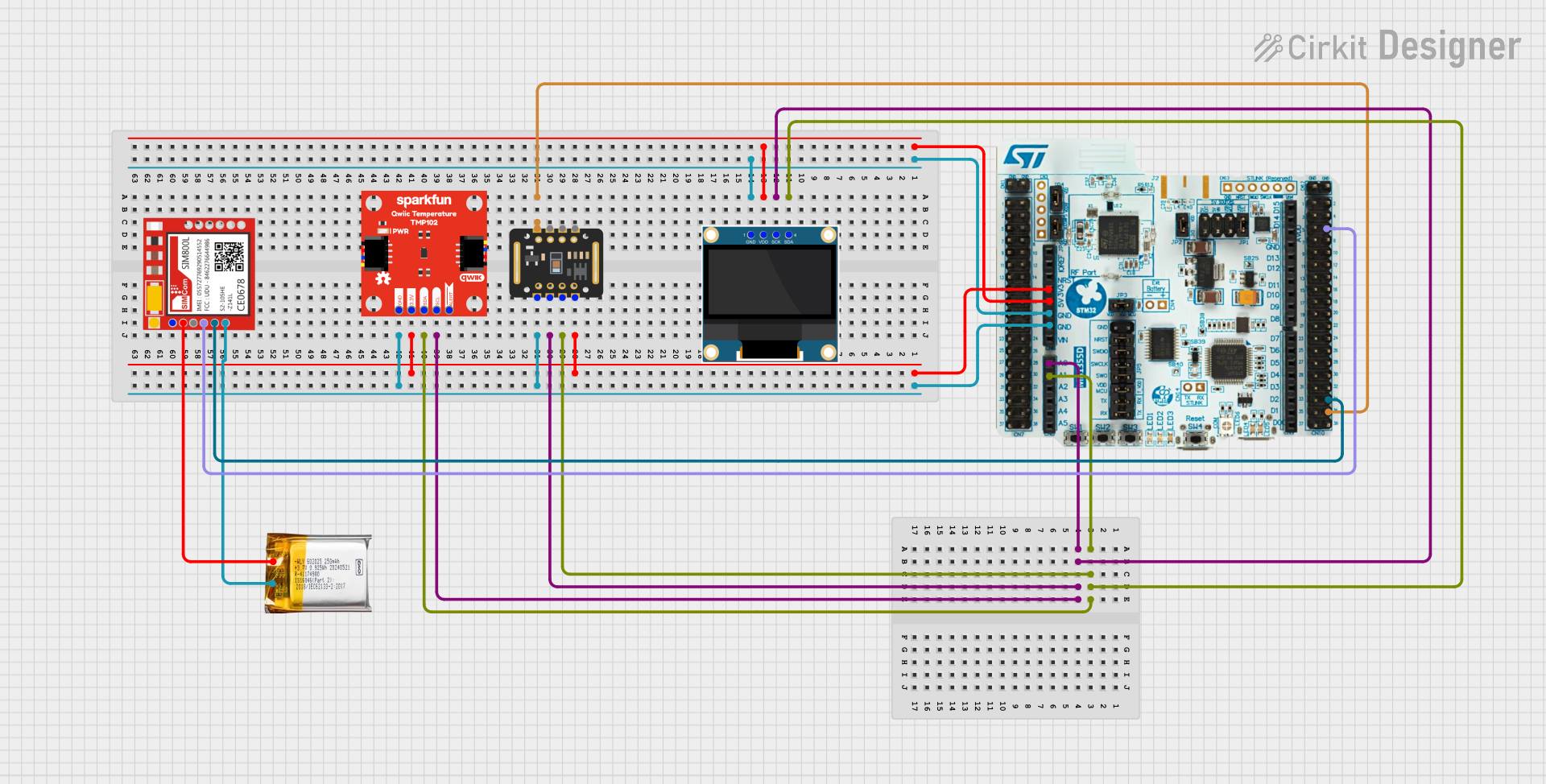
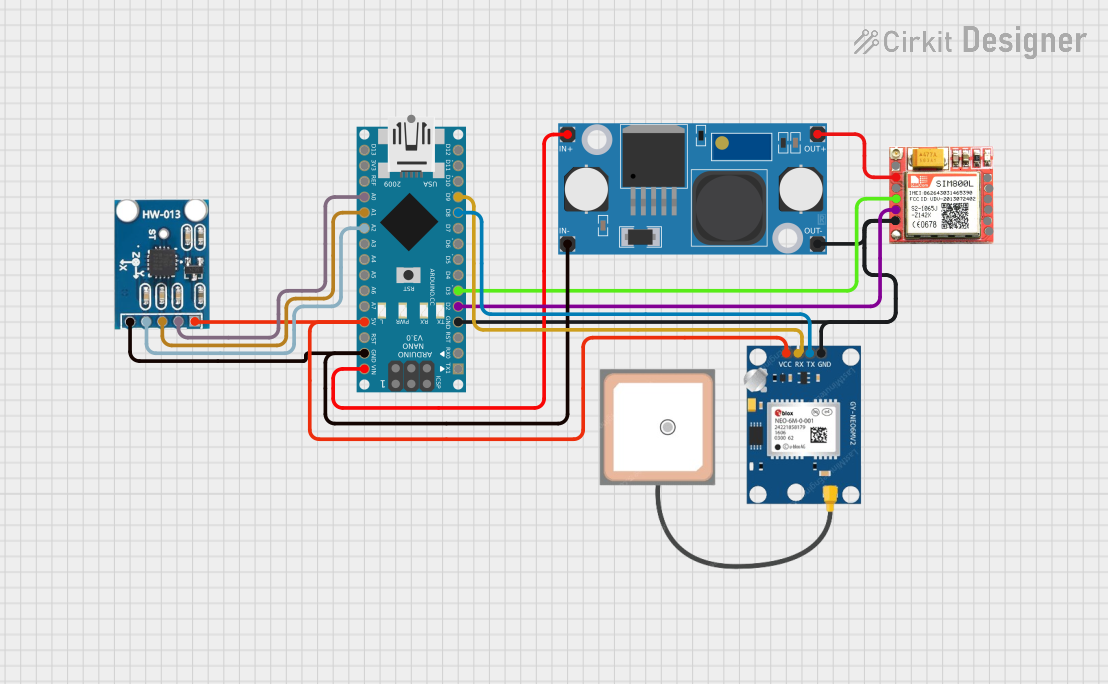
Explore Projects Built with QMC5883L
Common Applications and Use Cases
- Navigation systems (e.g., GPS modules with heading correction)
- Robotics for orientation and pathfinding
- Mobile devices for augmented reality and compass functionality
- Drones for stabilization and direction control
- Scientific instruments for magnetic field measurement
Technical Specifications
The QMC5883L is a high-performance magnetometer with the following key specifications:
| Parameter | Value |
|---|---|
| Manufacturer | QST |
| Part ID | QMC5883L |
| Operating Voltage | 2.16V to 3.6V |
| Interface | I2C |
| Measurement Range | ±8 Gauss |
| Resolution | 12-bit |
| Output Data Rate (ODR) | 10Hz, 50Hz, 100Hz, 200Hz |
| Operating Temperature | -40°C to +85°C |
| Power Consumption | 100 µA (typical) |
| Dimensions | 3mm x 3mm x 0.9mm |
Pin Configuration and Descriptions
The QMC5883L has a total of 8 pins, but only 4 are typically used for operation. Below is the pin configuration:
| Pin Name | Pin Number | Description |
|---|---|---|
| VDD | 1 | Power supply (2.16V to 3.6V) |
| GND | 2 | Ground |
| SDA | 3 | I2C data line |
| SCL | 4 | I2C clock line |
| DRDY | 5 | Data ready signal (optional) |
| NC | 6, 7, 8 | Not connected (leave unconnected) |
Usage Instructions
How to Use the QMC5883L in a Circuit
- Power Supply: Connect the VDD pin to a 3.3V power source and the GND pin to ground.
- I2C Communication: Connect the SDA and SCL pins to the corresponding I2C pins on your microcontroller. Use pull-up resistors (typically 4.7kΩ) on both SDA and SCL lines if not already present on your board.
- Optional DRDY Pin: The DRDY pin can be used to detect when new data is available. If not used, leave it unconnected.
- Address: The default I2C address of the QMC5883L is
0x0D.
Important Considerations and Best Practices
- Magnetic Interference: Avoid placing the QMC5883L near ferromagnetic materials or strong magnetic fields, as they can distort measurements.
- Calibration: Perform a calibration routine to account for hard-iron and soft-iron distortions in your environment.
- Data Rate: Choose an appropriate output data rate (ODR) based on your application to balance power consumption and responsiveness.
- Orientation: Mount the sensor on a stable surface with a known orientation to ensure accurate readings.
Example Code for Arduino UNO
Below is an example of how to interface the QMC5883L with an Arduino UNO using the Wire library:
#include <Wire.h>
#define QMC5883L_ADDRESS 0x0D // Default I2C address of QMC5883L
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial communication for debugging
// Initialize QMC5883L
Wire.beginTransmission(QMC5883L_ADDRESS);
Wire.write(0x0B); // Control register
Wire.write(0x01); // Set continuous measurement mode
Wire.endTransmission();
}
void loop() {
int16_t x, y, z;
// Request 6 bytes of data from QMC5883L
Wire.beginTransmission(QMC5883L_ADDRESS);
Wire.write(0x00); // Data output register
Wire.endTransmission();
Wire.requestFrom(QMC5883L_ADDRESS, 6);
if (Wire.available() == 6) {
// Read X, Y, Z axis data (16-bit values)
x = Wire.read() | (Wire.read() << 8);
y = Wire.read() | (Wire.read() << 8);
z = Wire.read() | (Wire.read() << 8);
// Print the values to the Serial Monitor
Serial.print("X: ");
Serial.print(x);
Serial.print(" Y: ");
Serial.print(y);
Serial.print(" Z: ");
Serial.println(z);
}
delay(500); // Wait for 500ms before the next reading
}
Troubleshooting and FAQs
Common Issues and Solutions
No Data Output:
- Ensure the QMC5883L is powered correctly (check VDD and GND connections).
- Verify the I2C address (
0x0D) and ensure no other devices on the bus conflict with it. - Check the pull-up resistors on the SDA and SCL lines.
Inaccurate Readings:
- Perform a calibration routine to account for environmental distortions.
- Ensure the sensor is mounted away from magnetic interference sources.
I2C Communication Errors:
- Check the wiring between the QMC5883L and the microcontroller.
- Ensure the I2C clock speed is compatible (typically 100kHz or 400kHz).
FAQs
Q: Can the QMC5883L be used with 5V microcontrollers?
A: The QMC5883L operates at 3.3V, but it can tolerate 5V logic levels on the I2C lines if proper level shifters are used.
Q: How do I calibrate the QMC5883L?
A: Rotate the sensor in all directions to collect raw data, then use an algorithm to calculate offsets and scaling factors for hard-iron and soft-iron corrections.
Q: What is the maximum distance for I2C communication?
A: The I2C bus is typically limited to a few meters, depending on the pull-up resistor values and the capacitance of the bus.
Q: Can the QMC5883L measure tilt or acceleration?
A: No, the QMC5883L is a magnetometer and does not measure tilt or acceleration. For such measurements, use an IMU (Inertial Measurement Unit) that includes an accelerometer and gyroscope.