How to Use 28YBJ-48 motor: Examples, Pinouts, and Specs
Introduction
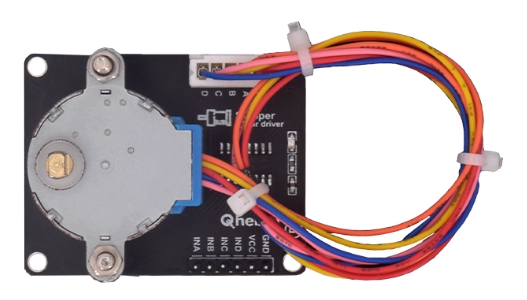
The 28YBJ-48 is a unipolar stepper motor widely used in robotics, automation, and other precision control applications. It operates on a 5V DC supply and features a 4-phase design, allowing for precise control of rotation and position. This motor is compact, cost-effective, and easy to interface with microcontrollers, making it a popular choice for hobbyists and professionals alike.
Explore Projects Built with 28YBJ-48 motor
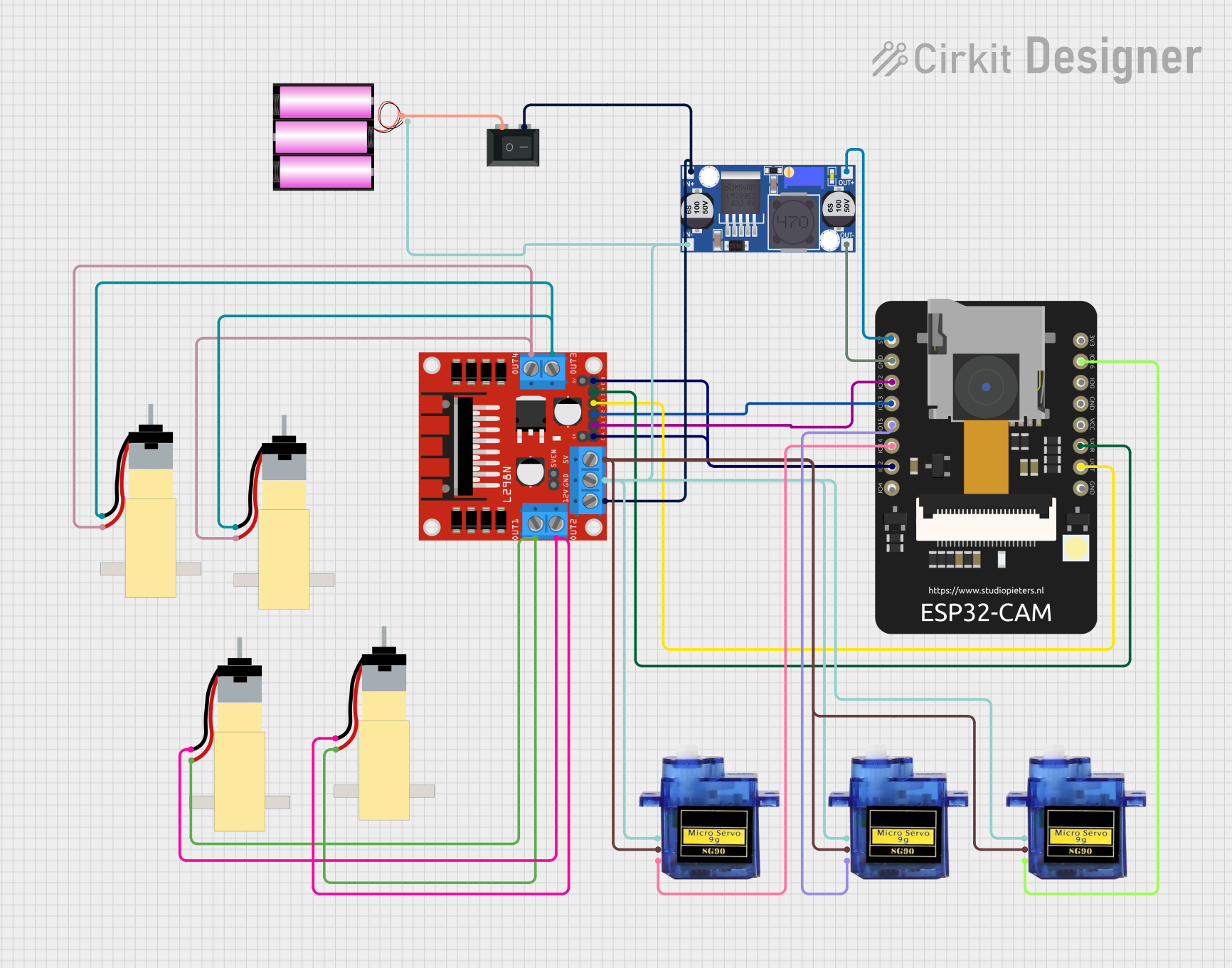
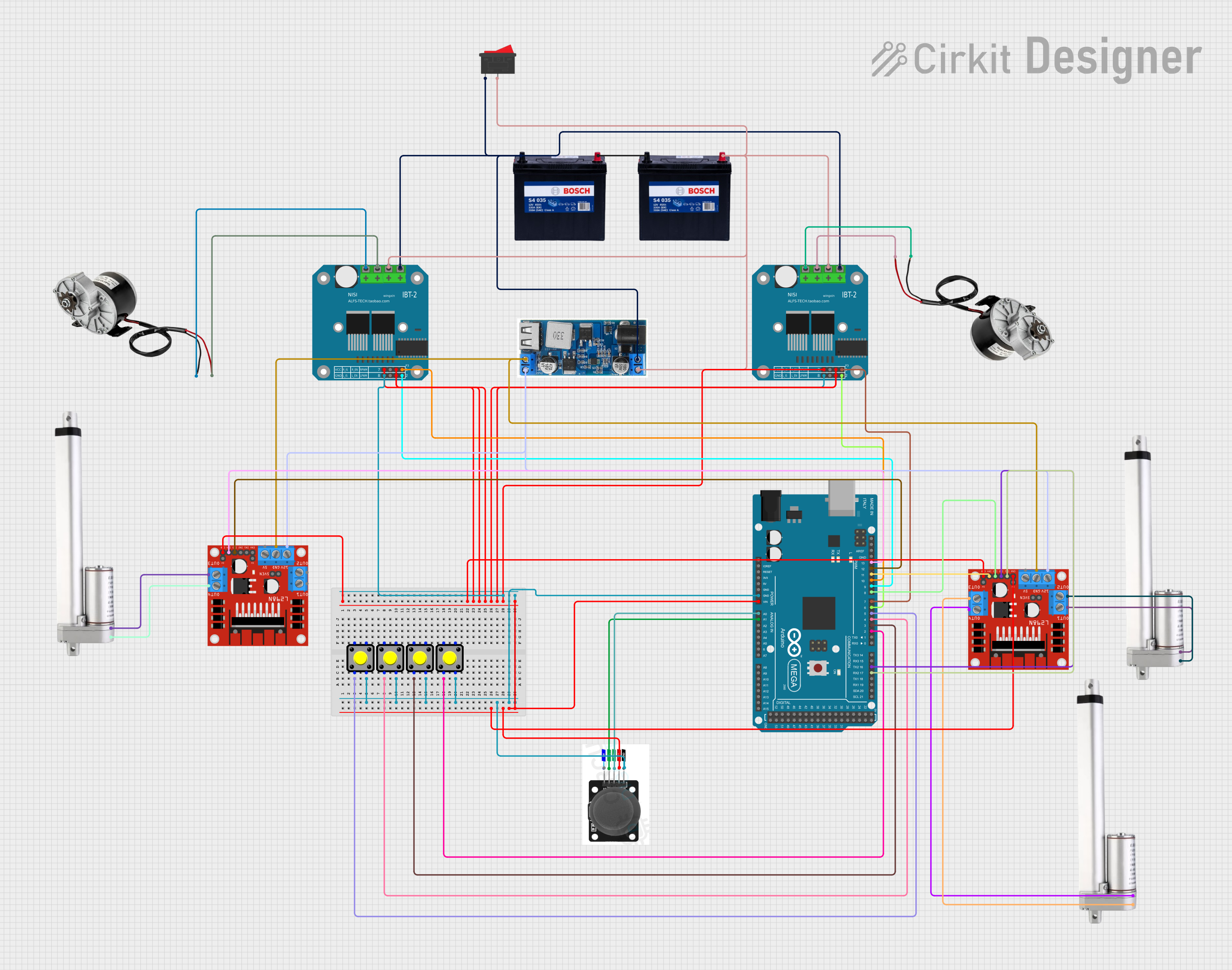

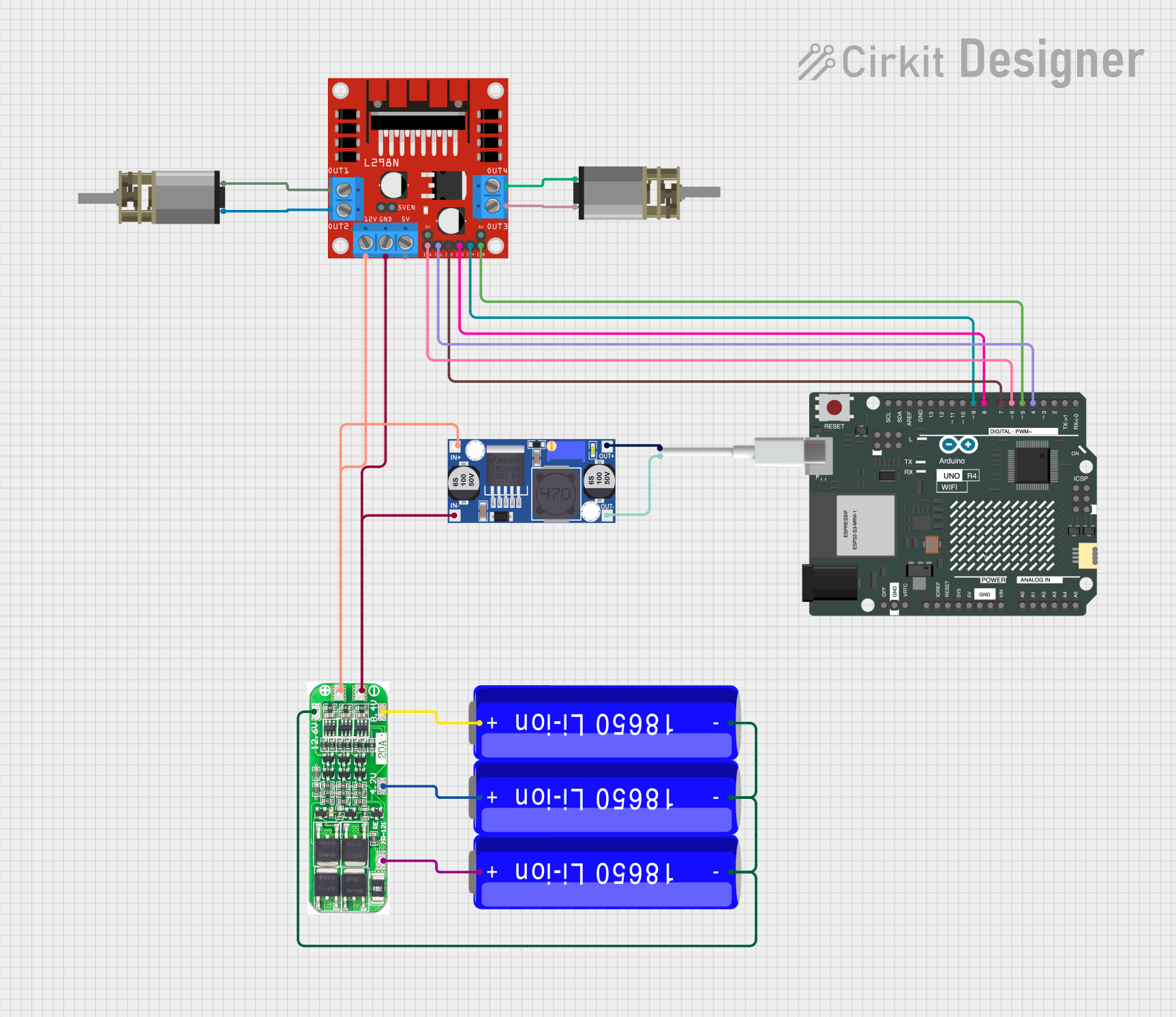
Explore Projects Built with 28YBJ-48 motor
Common Applications
- Robotic arms and grippers
- Automated curtain systems
- 3D printers and CNC machines
- Camera gimbals and pan-tilt mechanisms
- Educational and DIY electronics projects
Technical Specifications
Below are the key technical details of the 28YBJ-48 stepper motor:
| Parameter | Value |
|---|---|
| Operating Voltage | 5V DC |
| Step Angle | 5.625°/step |
| Steps per Revolution | 64 steps (gearbox output) |
| Gear Ratio | 1:64 |
| Phases | 4 |
| Drive Type | Unipolar |
| Rated Current per Phase | ~240 mA |
| Torque | ~34 mNm |
| Dimensions | 28 mm diameter, 20 mm height |
| Shaft Diameter | 5 mm |
Pin Configuration
The 28YBJ-48 motor typically comes with a 5-pin connector for interfacing with a driver module (e.g., ULN2003). Below is the pin configuration:
| Pin Number | Wire Color | Description |
|---|---|---|
| 1 | Orange | Coil A |
| 2 | Yellow | Coil B |
| 3 | Pink | Coil C |
| 4 | Blue | Coil D |
| 5 | Red | Common Power (Vcc) |
Note: The wire colors may vary depending on the manufacturer. Always refer to the datasheet or test the motor to confirm the pinout.
Usage Instructions
How to Use the 28YBJ-48 in a Circuit
- Connect the Motor to a Driver Module: The 28YBJ-48 is typically used with a ULN2003 driver module. Plug the motor's 5-pin connector into the ULN2003 module.
- Power the Motor: Provide a 5V DC supply to the ULN2003 module. Ensure the power source can supply sufficient current (~240 mA per phase).
- Control the Motor: Use a microcontroller (e.g., Arduino UNO) to send control signals to the ULN2003 module. The motor is driven by energizing its coils in a specific sequence.
Important Considerations
- Power Supply: Ensure the power supply is stable and capable of providing the required current. Using a power source with insufficient current may cause the motor to stall or behave erratically.
- Step Sequence: The motor requires a specific step sequence to rotate correctly. This sequence can be implemented in software.
- Heat Management: Prolonged operation may cause the motor to heat up. Ensure adequate ventilation or limit continuous operation time.
Arduino UNO Example Code
Below is an example code to control the 28YBJ-48 motor using an Arduino UNO and the ULN2003 driver module:
// Example code to control the 28YBJ-48 stepper motor with Arduino UNO
// Ensure the motor is connected to the ULN2003 driver module
#include <Stepper.h>
// Define the number of steps per revolution for the motor
#define STEPS_PER_REV 2048 // 64 steps * 64 gear ratio
// Initialize the Stepper library with the motor's pin connections
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
// Pins 8, 10, 9, 11 correspond to IN1, IN2, IN3, IN4 on the ULN2003
void setup() {
// Set the motor speed (in RPM)
stepper.setSpeed(10); // Adjust speed as needed
Serial.begin(9600);
Serial.println("28YBJ-48 Stepper Motor Test");
}
void loop() {
// Rotate the motor one full revolution clockwise
Serial.println("Rotating clockwise...");
stepper.step(STEPS_PER_REV);
delay(1000); // Wait for 1 second
// Rotate the motor one full revolution counterclockwise
Serial.println("Rotating counterclockwise...");
stepper.step(-STEPS_PER_REV);
delay(1000); // Wait for 1 second
}
Note: Adjust the pin numbers in the
Stepperinitialization if your wiring differs. Ensure the motor's speed is set appropriately to avoid skipping steps.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Rotating
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check the wiring between the motor, driver module, and microcontroller. Ensure the power supply provides at least 5V and sufficient current.
Motor Vibrates but Does Not Rotate
- Cause: Incorrect step sequence or low speed setting.
- Solution: Verify the step sequence in your code. Increase the motor speed slightly to ensure smooth operation.
Motor Overheating
- Cause: Prolonged operation or excessive current.
- Solution: Limit continuous operation time. Use a heat sink or fan if necessary.
Inconsistent Movement
- Cause: Loose connections or unstable power supply.
- Solution: Secure all connections and use a regulated power supply.
FAQs
Can I power the motor directly from the Arduino? No, the Arduino cannot supply enough current to drive the motor. Always use an external power source and a driver module like the ULN2003.
What is the maximum speed of the 28YBJ-48 motor? The maximum speed depends on the load and power supply but is typically around 15–20 RPM.
Can I use the 28YBJ-48 without a driver module? While possible, it is not recommended. A driver module simplifies control and protects the microcontroller from high currents.
How do I reverse the motor's direction? To reverse the direction, simply reverse the step sequence in your code or use negative step values in the
stepper.step()function.
By following this documentation, you can effectively use the 28YBJ-48 stepper motor in your projects.