How to Use Sabertooth 32A Dual Motor Driver: Examples, Pinouts, and Specs
Introduction
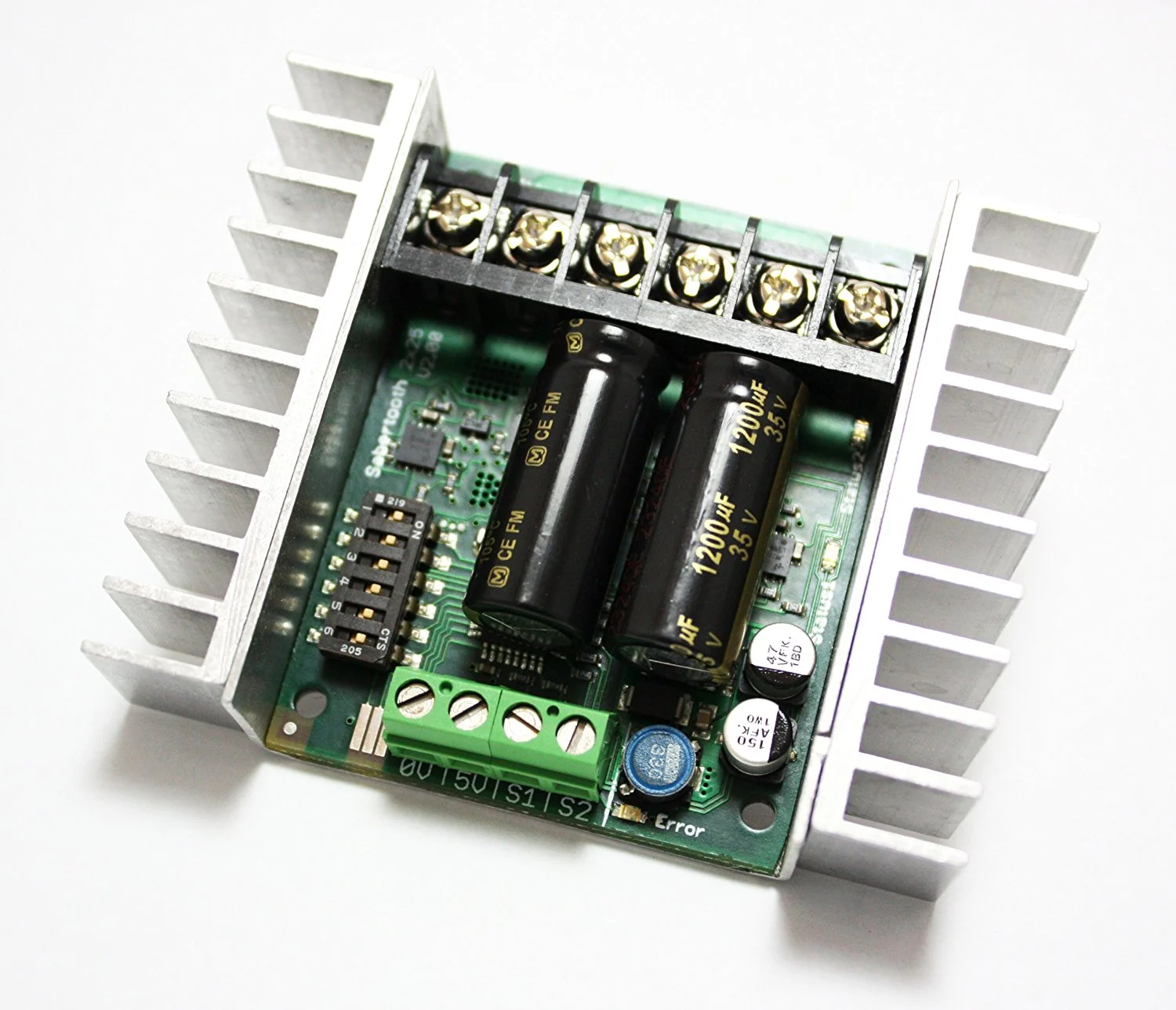
The Sabertooth 32A Dual Motor Driver is a robust and versatile motor driver designed to control two motors with a continuous current of 32A per channel. This component is widely used in robotics and automation applications where precise motor control is essential. Its high current capacity and ease of integration make it a popular choice for hobbyists and professionals alike.
Explore Projects Built with Sabertooth 32A Dual Motor Driver
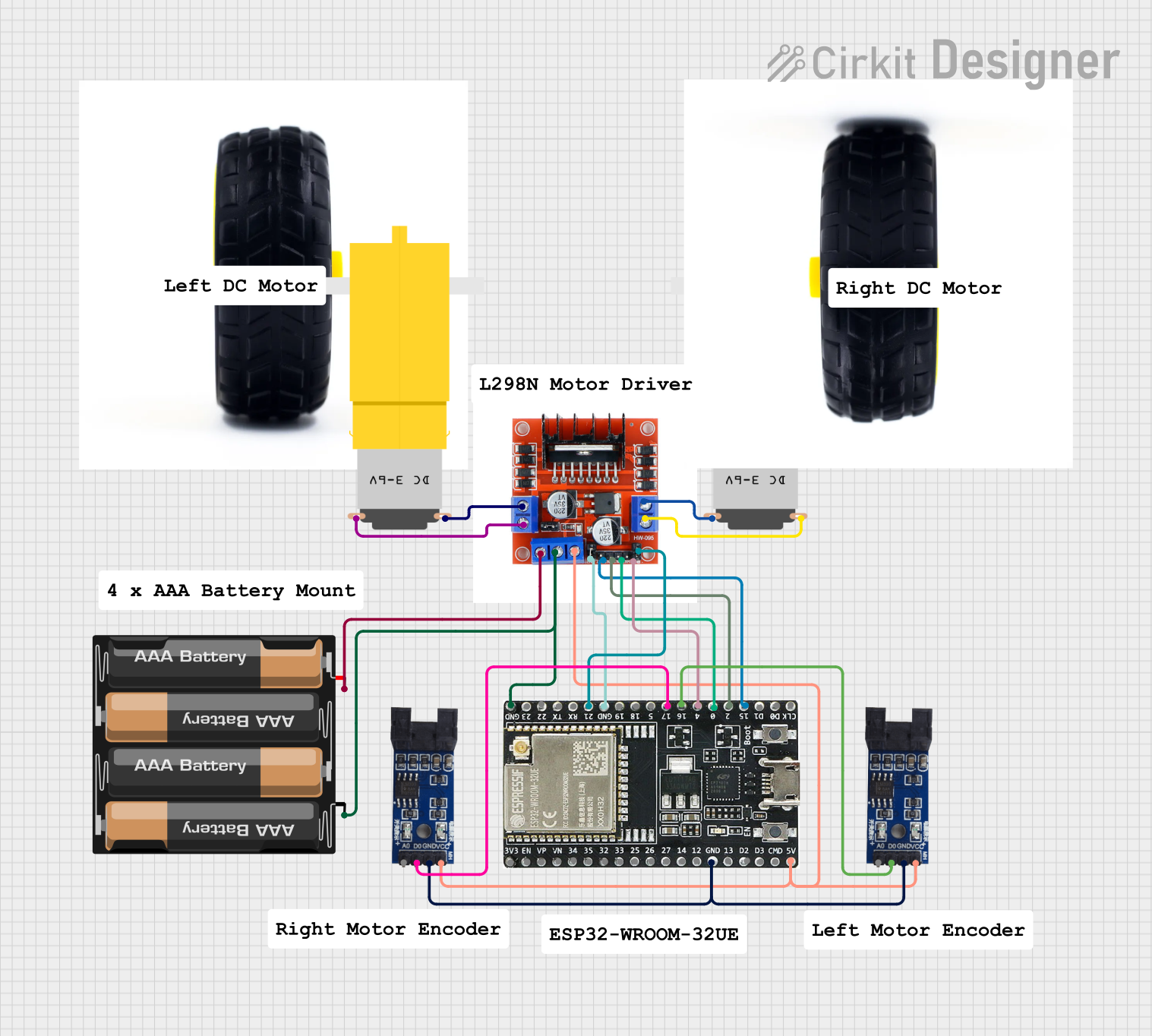
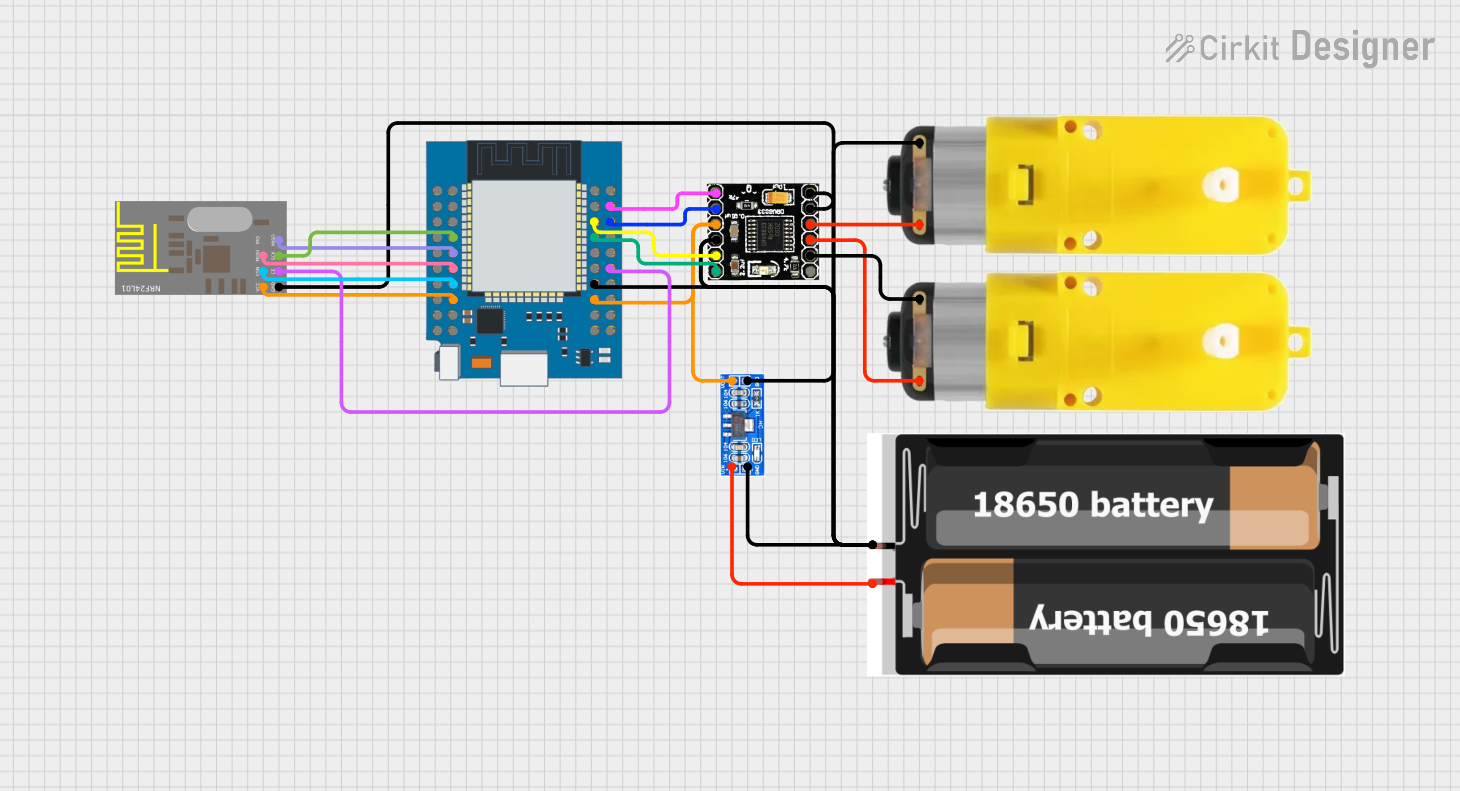
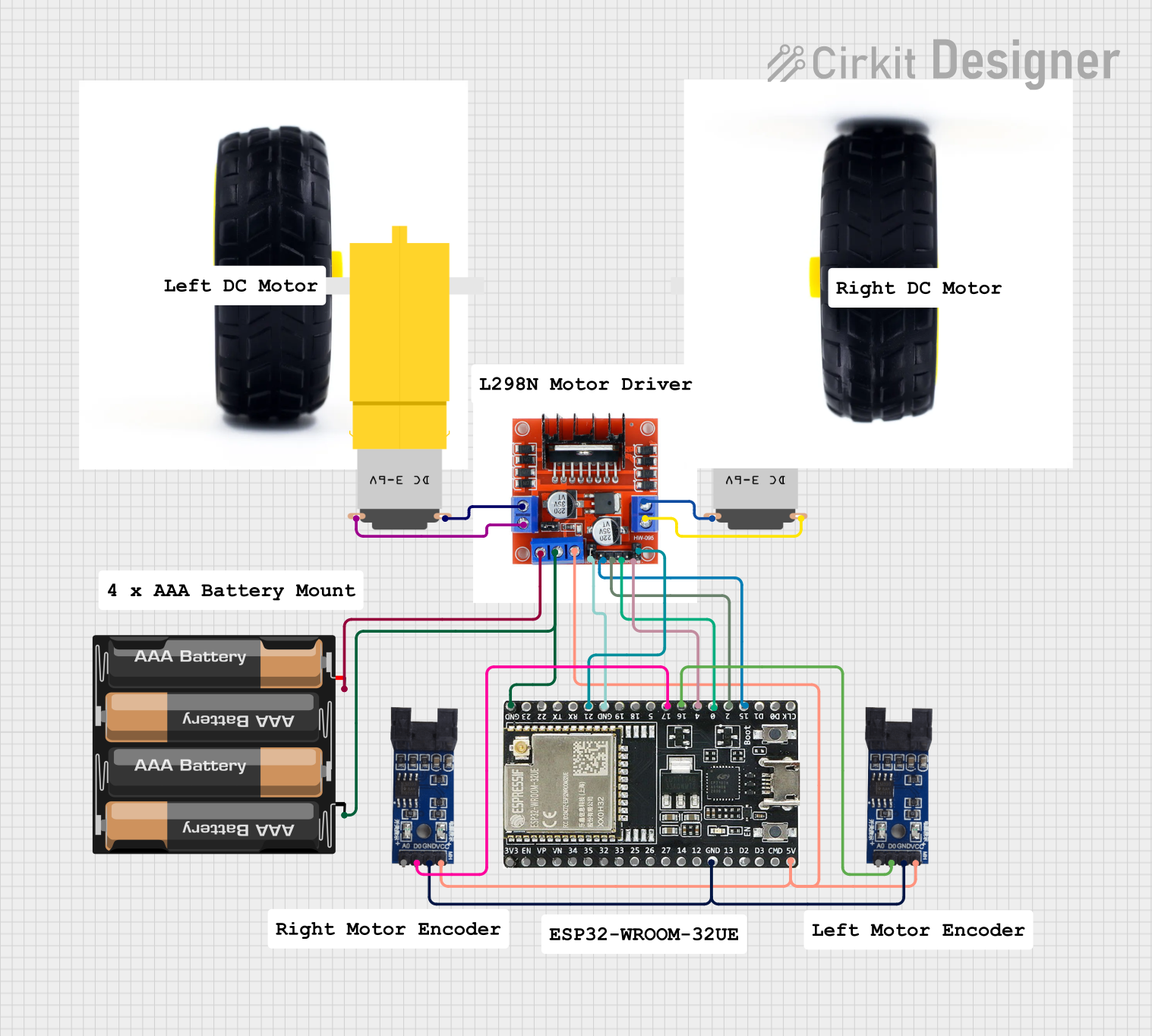
Explore Projects Built with Sabertooth 32A Dual Motor Driver
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Continuous Current | 32A per channel |
| Peak Current | 64A per channel |
| Operating Voltage Range | 6V to 30V |
| Control Interface | Analog, R/C, Serial, Packet |
| Dimensions | 3.25" x 2.75" x 1" |
| Weight | 100 grams |
| Thermal Protection | Yes |
| Overcurrent Protection | Yes |
| Reverse Voltage Protection | Yes |
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | S1 | Signal input for motor 1 |
| 2 | S2 | Signal input for motor 2 |
| 3 | 0V | Ground |
| 4 | 5V | 5V output for powering external devices |
| 5 | M1A | Motor 1 output A |
| 6 | M1B | Motor 1 output B |
| 7 | M2A | Motor 2 output A |
| 8 | M2B | Motor 2 output B |
| 9 | B+ | Battery positive terminal |
| 10 | B- | Battery negative terminal |
Usage Instructions
How to Use the Component in a Circuit
Power Connections:
- Connect the B+ pin to the positive terminal of your power supply.
- Connect the B- pin to the negative terminal of your power supply.
Motor Connections:
- Connect the M1A and M1B pins to the terminals of motor 1.
- Connect the M2A and M2B pins to the terminals of motor 2.
Control Signal Connections:
- For analog control, connect the S1 and S2 pins to your control signal source.
- For serial control, connect the S1 pin to the TX pin of your microcontroller.
Ground Connection:
- Connect the 0V pin to the ground of your control signal source.
Important Considerations and Best Practices
- Heat Dissipation: Ensure adequate ventilation or cooling to prevent overheating.
- Current Limiting: Use appropriate fuses or circuit breakers to protect against overcurrent.
- Signal Integrity: Use shielded cables for long signal connections to reduce noise.
- Power Supply: Ensure your power supply can handle the peak current requirements of your motors.
Example Code for Arduino UNO
#include <SoftwareSerial.h>
// Define pins for SoftwareSerial
#define RX_PIN 10
#define TX_PIN 11
// Create a SoftwareSerial object
SoftwareSerial motorSerial(RX_PIN, TX_PIN);
void setup() {
// Start the serial communication with the motor driver
motorSerial.begin(9600);
// Set the motor speed to 50% forward
setMotorSpeed(1, 127);
setMotorSpeed(2, 127);
}
void loop() {
// Example: Change motor speed every 2 seconds
setMotorSpeed(1, 127); // Motor 1 forward at 50%
setMotorSpeed(2, -127); // Motor 2 reverse at 50%
delay(2000);
setMotorSpeed(1, -127); // Motor 1 reverse at 50%
setMotorSpeed(2, 127); // Motor 2 forward at 50%
delay(2000);
}
void setMotorSpeed(int motor, int speed) {
// Ensure speed is within the valid range
if (speed < -127) speed = -127;
if (speed > 127) speed = 127;
// Construct the command byte
byte command = (motor == 1) ? 0 : 4;
command |= (speed < 0) ? 1 : 0;
// Send the command and speed to the motor driver
motorSerial.write(command);
motorSerial.write(abs(speed));
}
Troubleshooting and FAQs
Common Issues Users Might Face
Motor Not Running:
- Solution: Check power connections and ensure the power supply is adequate.
- Solution: Verify control signal connections and ensure they are correct.
Overheating:
- Solution: Ensure proper ventilation and consider adding a cooling fan.
- Solution: Check for overcurrent conditions and reduce motor load if necessary.
Erratic Motor Behavior:
- Solution: Use shielded cables for control signals to reduce noise.
- Solution: Ensure the ground connection is secure and common with the control source.
FAQs
Q1: Can I use the Sabertooth 32A Dual Motor Driver with a 24V power supply?
- A1: Yes, the driver supports an operating voltage range of 6V to 30V.
Q2: How do I switch between different control modes?
- A2: Refer to the Sabertooth user manual for detailed instructions on configuring control modes.
Q3: What should I do if the motor driver shuts down unexpectedly?
- A3: Check for overcurrent or overheating conditions and ensure the power supply is stable.
This documentation provides a comprehensive guide to using the Sabertooth 32A Dual Motor Driver. By following the instructions and best practices outlined, users can achieve reliable and efficient motor control in their projects.