How to Use IBT-2 H-Bridge Motor Driver: Examples, Pinouts, and Specs
Introduction
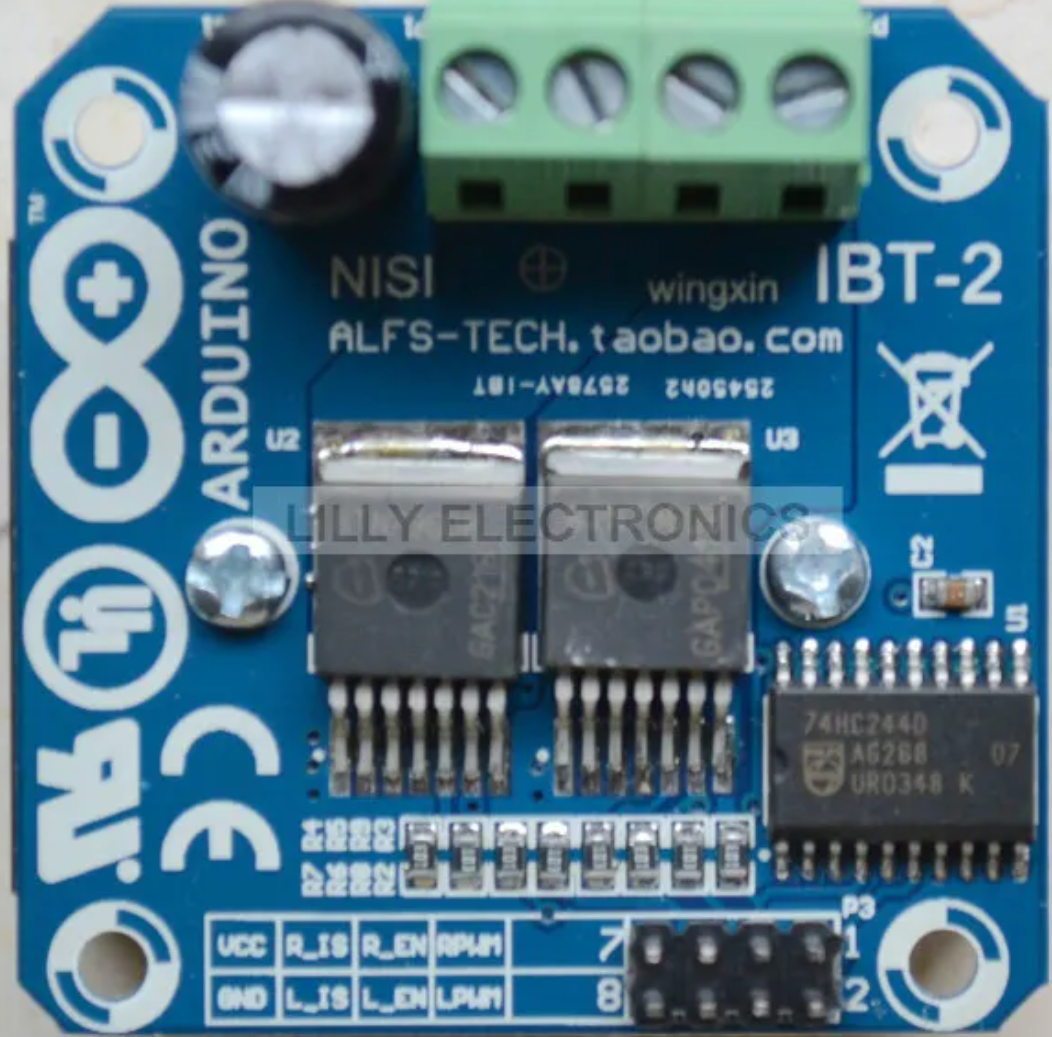
The IBT-2 H-Bridge Motor Driver is a robust electronic component designed for controlling DC motors' direction and speed. It is capable of driving high-power motors in both forward and reverse directions. This makes it an ideal choice for robotics, automation projects, and any application requiring bidirectional motor control.
Explore Projects Built with IBT-2 H-Bridge Motor Driver


Explore Projects Built with IBT-2 H-Bridge Motor Driver
Common Applications and Use Cases
- Robotics
- Automated machinery
- Electric vehicles
- Conveyor systems
- Actuators for mechanical systems
Technical Specifications
Key Technical Details
- Supply Voltage (Vcc): 6V to 27V
- Logic Voltage (Vlogic): 5V (compatible with Arduino)
- Continuous Current: Up to 43A
- Peak Current: 100A (for a few seconds)
- Operating Temperature: -25°C to +135°C
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | RPWM | Right PWM input for motor speed and direction |
| 2 | LPWM | Left PWM input for motor speed and direction |
| 3 | R_EN | Right Enable input |
| 4 | L_EN | Left Enable input |
| 5 | Vcc | Power supply for motor (6V to 27V) |
| 6 | GND | Ground |
| 7 | B+ | Motor power supply positive |
| 8 | B- | Motor power supply negative |
Usage Instructions
How to Use the Component in a Circuit
Power Connections:
- Connect the motor's positive lead to the B+ pin and the negative lead to the B- pin.
- Apply a DC voltage between 6V and 27V to the Vcc pin for the motor power supply.
- Connect the ground of the power supply to the GND pin.
Control Connections:
- Connect the R_EN and L_EN pins to a digital output on your control board (e.g., Arduino) to enable or disable the motor driver.
- Apply PWM signals to the RPWM and LPWM pins to control the motor's speed and direction.
Important Considerations and Best Practices
- Ensure that the power supply can handle the motor's current requirements.
- Use a flyback diode across the motor terminals to protect the driver from voltage spikes.
- Avoid running the motor driver at its peak current for extended periods to prevent overheating.
- Implement proper heat dissipation techniques if operating near the maximum current rating.
Example Code for Arduino UNO
// Define the control pins for the IBT-2
const int RPWM = 3; // Right PWM pin connected to Arduino pin 3
const int LPWM = 5; // Left PWM pin connected to Arduino pin 5
const int R_EN = 4; // Right Enable pin connected to Arduino pin 4
const int L_EN = 6; // Left Enable pin connected to Arduino pin 6
void setup() {
// Set all the control pins as outputs
pinMode(RPWM, OUTPUT);
pinMode(LPWM, OUTPUT);
pinMode(R_EN, OUTPUT);
pinMode(L_EN, OUTPUT);
// Enable the motor driver
digitalWrite(R_EN, HIGH);
digitalWrite(L_EN, HIGH);
}
void loop() {
// Spin motor forward at full speed
analogWrite(RPWM, 255); // Full speed forward
analogWrite(LPWM, 0); // Ensure LPWM is low
delay(2000); // Run for 2 seconds
// Spin motor in reverse at half speed
analogWrite(RPWM, 0); // Ensure RPWM is low
analogWrite(LPWM, 127); // Half speed reverse
delay(2000); // Run for 2 seconds
// Stop the motor
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
delay(2000); // Stop for 2 seconds
}
Troubleshooting and FAQs
Common Issues
- Motor not responding: Check power supply connections and ensure that the enable pins are set high.
- Overheating: Ensure proper heat dissipation and that the current does not exceed the continuous rating.
- Erratic motor behavior: Verify that the PWM signals are correctly applied and that there is no interference.
Solutions and Tips for Troubleshooting
- Double-check wiring and solder joints for any loose connections or shorts.
- Use a multimeter to verify the voltage at the motor driver's power pins.
- Implement a gradual start/stop in your code to reduce mechanical stress and electrical spikes.
FAQs
Q: Can I control two motors with one IBT-2? A: No, the IBT-2 is designed to control one motor. For two motors, you would need two IBT-2 modules.
Q: What is the maximum PWM frequency for the IBT-2? A: The IBT-2 can handle PWM frequencies up to 25kHz.
Q: How do I reverse the motor direction? A: To reverse the motor direction, invert the PWM signals: apply the PWM signal to LPWM for forward and RPWM for reverse.
Q: Can I use the IBT-2 with a microcontroller running at 3.3V logic? A: While the IBT-2 is designed for 5V logic, it may work at 3.3V. However, it is recommended to use a logic level converter for reliable operation.