How to Use N20 Motor: Examples, Pinouts, and Specs
Introduction
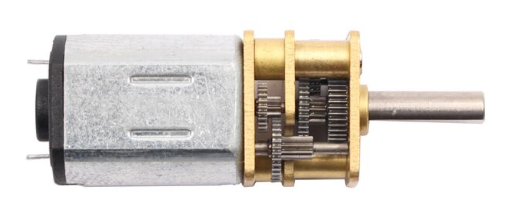
The N20 Motor is a small, compact DC motor manufactured by Arduino, designed for use in robotics, automation, and other motion control applications. Known for its high torque and efficiency, the N20 Motor is lightweight and versatile, making it an excellent choice for projects requiring precise and reliable motorized movement. Its compact size allows it to fit into tight spaces, while its robust design ensures durability and consistent performance.
Explore Projects Built with N20 Motor
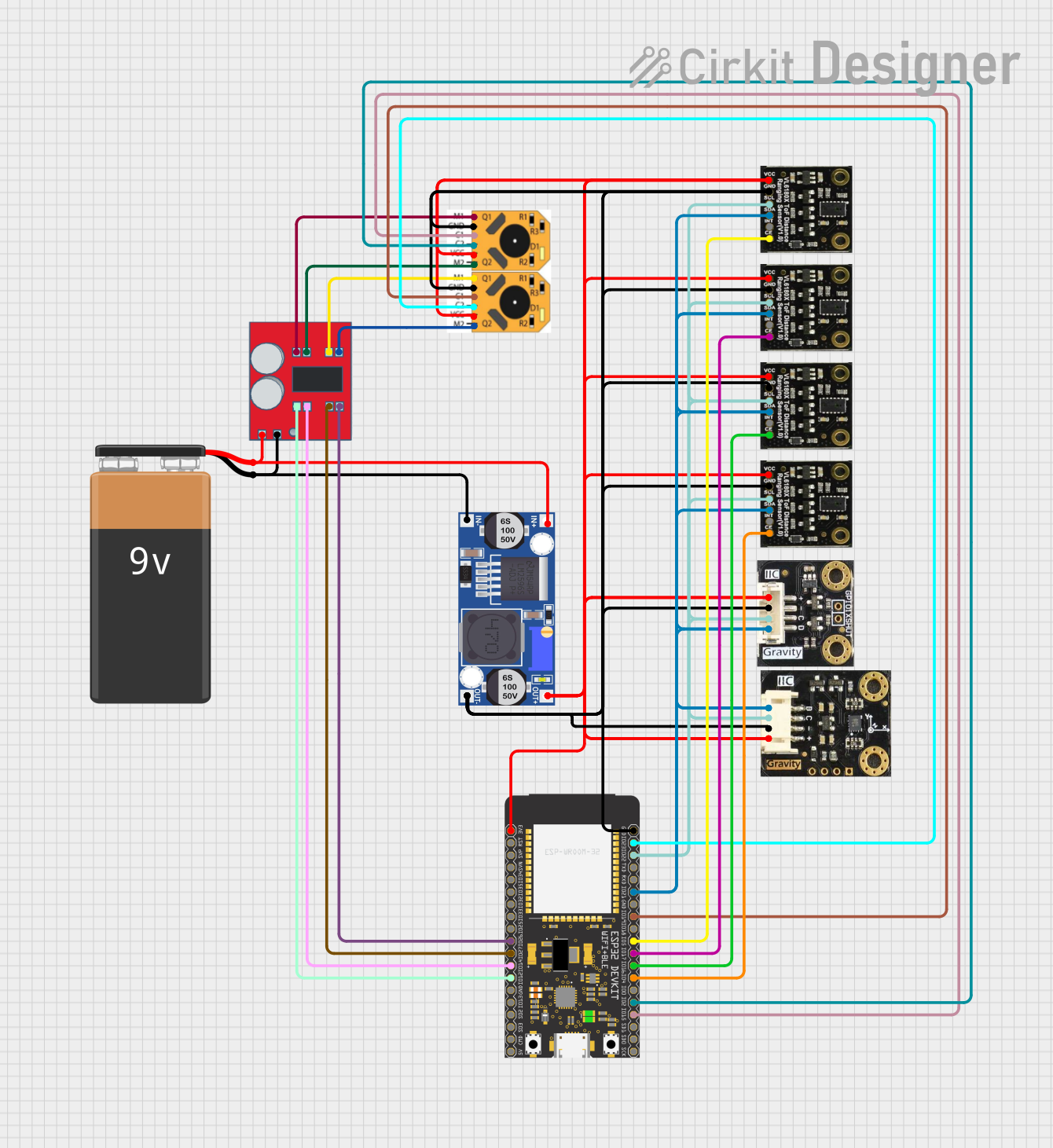
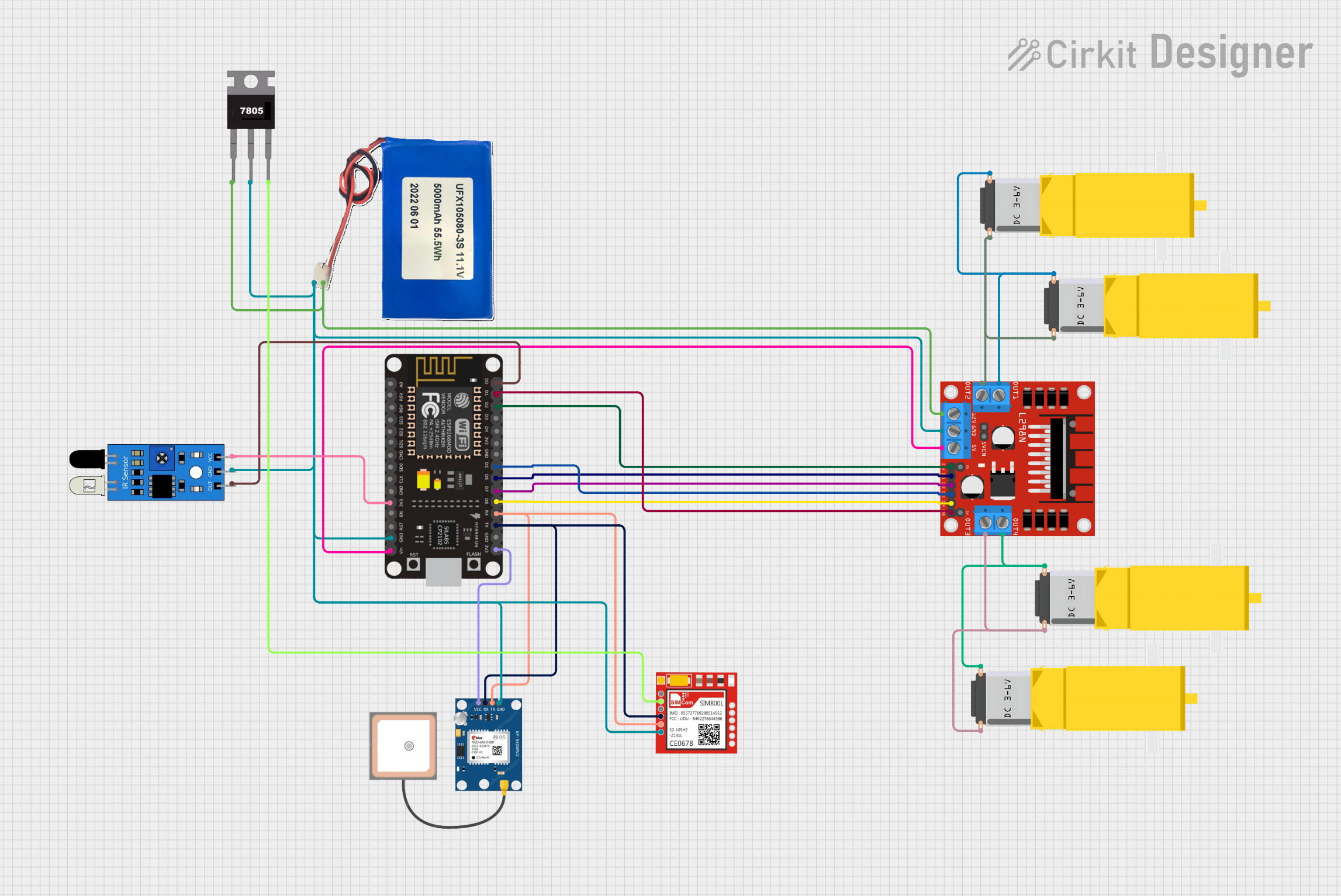
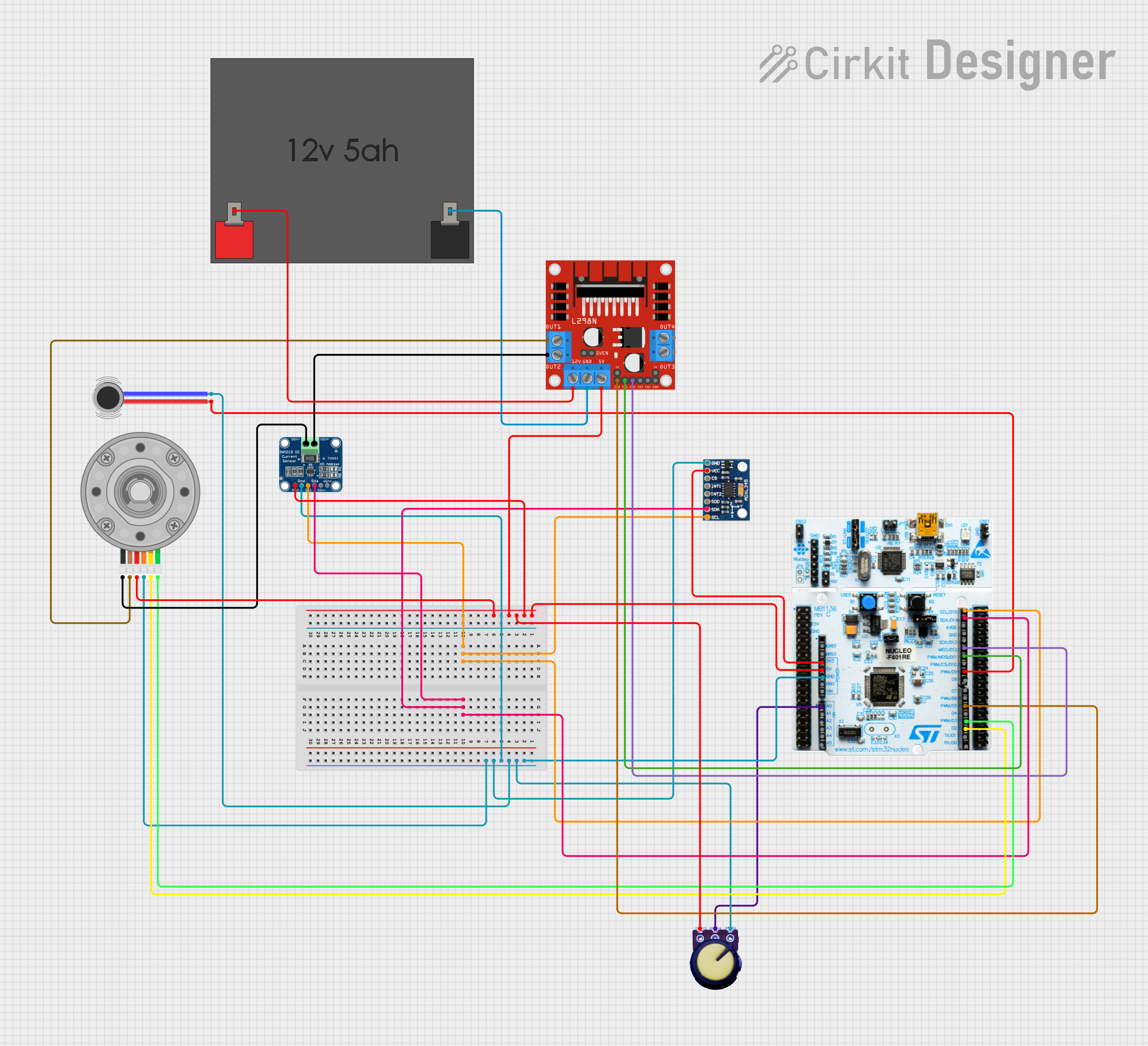
Explore Projects Built with N20 Motor
Common Applications
- Robotics (e.g., driving wheels, robotic arms)
- Automation systems
- Small conveyor belts
- DIY projects and hobbyist applications
- Educational kits for learning about DC motors
Technical Specifications
The following table outlines the key technical details of the N20 Motor:
| Parameter | Value |
|---|---|
| Manufacturer | Arduino |
| Part ID | N20 Motor |
| Operating Voltage | 3V to 12V |
| Rated Voltage | 6V |
| No-Load Speed | 30 to 1000 RPM (varies by model) |
| Stall Torque | Up to 1.5 kg·cm |
| Stall Current | ~0.3A to 1.2A (varies by model) |
| Gear Ratio | 1:10 to 1:1000 (varies by model) |
| Motor Type | Brushed DC Motor |
| Dimensions | 12mm x 10mm x 26mm |
| Weight | ~10g |
Pin Configuration and Descriptions
The N20 Motor has two terminals for electrical connections:
| Pin | Description |
|---|---|
| Pin 1 | Positive terminal (connect to VCC) |
| Pin 2 | Negative terminal (connect to GND) |
Note: The polarity of the connections determines the direction of motor rotation. Reversing the polarity will reverse the motor's direction.
Usage Instructions
How to Use the N20 Motor in a Circuit
- Power Supply: Connect the motor to a DC power source within the operating voltage range (3V to 12V). A 6V power supply is recommended for optimal performance.
- Motor Driver: Use a motor driver (e.g., L298N, L293D, or an H-bridge circuit) to control the motor. Directly connecting the motor to a microcontroller is not recommended due to the high current draw.
- Polarity Control: To change the direction of rotation, reverse the polarity of the connections.
- PWM Control: Use Pulse Width Modulation (PWM) to control the motor's speed. This can be achieved using a microcontroller like the Arduino UNO.
Example: Connecting the N20 Motor to an Arduino UNO
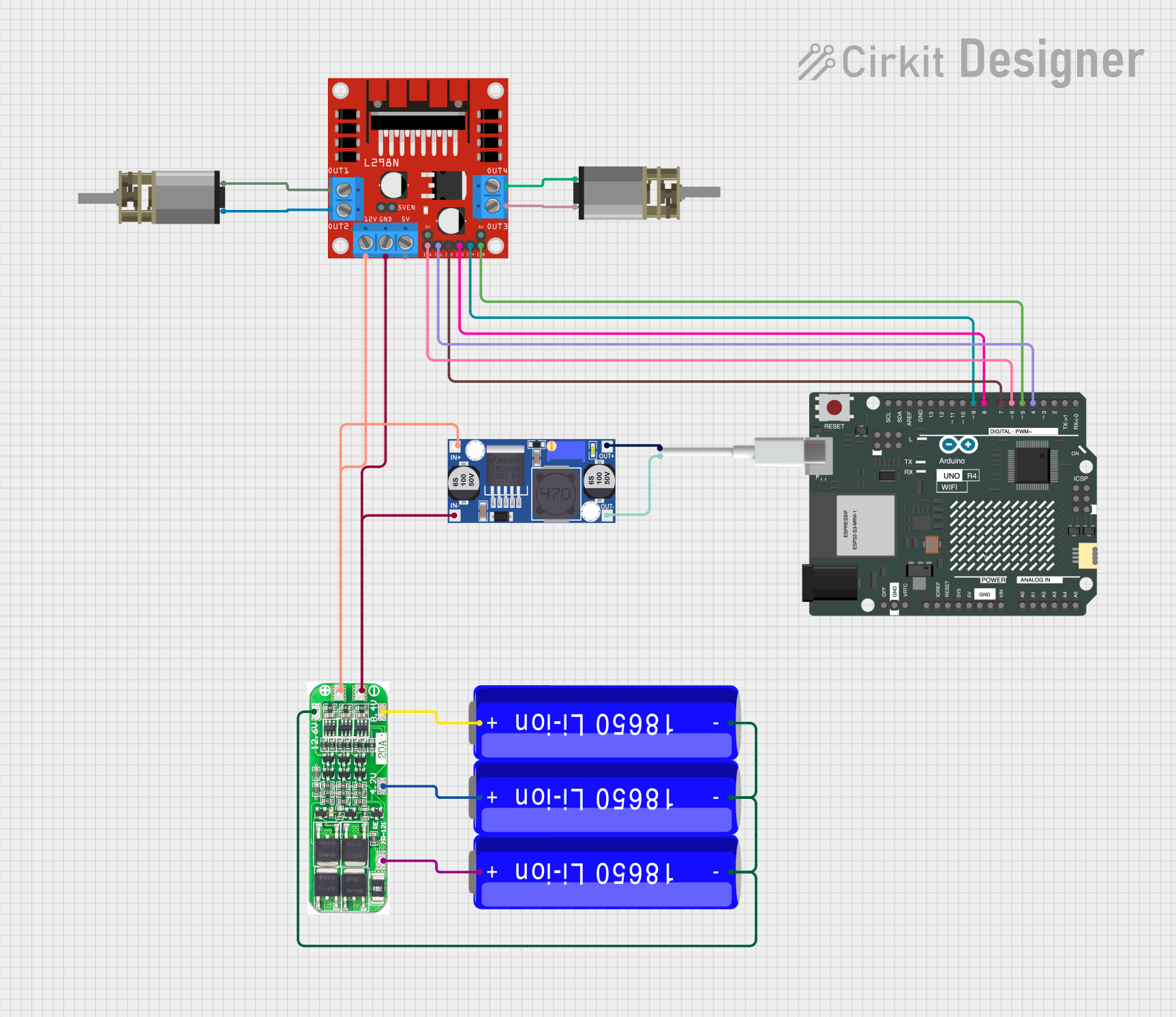
Below is an example of how to control the N20 Motor using an Arduino UNO and an L298N motor driver:
Circuit Connections
- Connect the motor terminals to the output pins of the L298N motor driver (e.g., OUT1 and OUT2).
- Connect the L298N's input pins (e.g., IN1 and IN2) to Arduino digital pins (e.g., D9 and D10).
- Connect the L298N's VCC and GND to a 6V power supply.
- Connect the L298N's ENA pin to Arduino's PWM pin (e.g., D3) for speed control.
Arduino Code
// Define motor control pins
const int motorPin1 = 9; // IN1 on L298N
const int motorPin2 = 10; // IN2 on L298N
const int enablePin = 3; // ENA on L298N (PWM pin)
void setup() {
// Set motor control pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(enablePin, OUTPUT);
}
void loop() {
// Rotate motor forward at 50% speed
analogWrite(enablePin, 128); // Set PWM duty cycle (0-255)
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
delay(1000); // Pause for 1 second
// Rotate motor backward at 75% speed
analogWrite(enablePin, 192); // Set PWM duty cycle (0-255)
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
delay(1000); // Pause for 1 second
}
Important Considerations
- Current Limitation: Ensure the motor driver can handle the stall current of the motor to avoid damage.
- Heat Dissipation: Prolonged operation at high torque may cause the motor to heat up. Allow for adequate cooling.
- Power Supply: Use a stable power supply to prevent voltage fluctuations that could affect motor performance.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Does Not Spin
- Cause: Insufficient power supply or incorrect wiring.
- Solution: Verify the power supply voltage and current. Check all connections.
Motor Spins in the Wrong Direction
- Cause: Polarity of the connections is reversed.
- Solution: Swap the motor terminals or adjust the control signals.
Motor Overheats
- Cause: Prolonged operation at high torque or overvoltage.
- Solution: Reduce the load on the motor or ensure the voltage is within the specified range.
Motor Vibrates but Does Not Rotate
- Cause: Insufficient torque or mechanical obstruction.
- Solution: Check for obstructions and ensure the motor is not overloaded.
FAQs
Q: Can the N20 Motor be powered directly from an Arduino UNO?
A: No, the N20 Motor requires more current than the Arduino UNO can supply. Use a motor driver or external power source.
Q: How do I control the speed of the N20 Motor?
A: Use PWM (Pulse Width Modulation) to control the motor's speed. This can be achieved using a motor driver and an Arduino.
Q: Can the N20 Motor be used for continuous operation?
A: Yes, but ensure proper cooling and avoid exceeding the motor's rated torque and voltage to prevent overheating.
Q: What gear ratio should I choose?
A: The gear ratio depends on your application. Higher gear ratios provide more torque but lower speed, while lower gear ratios provide higher speed but less torque.