Cirkit Designer
Your all-in-one circuit design IDE
Home /
Component Documentation
How to Use L298N Motor Driver Controller Board Module Stepper Motor: Examples, Pinouts, and Specs
Introduction
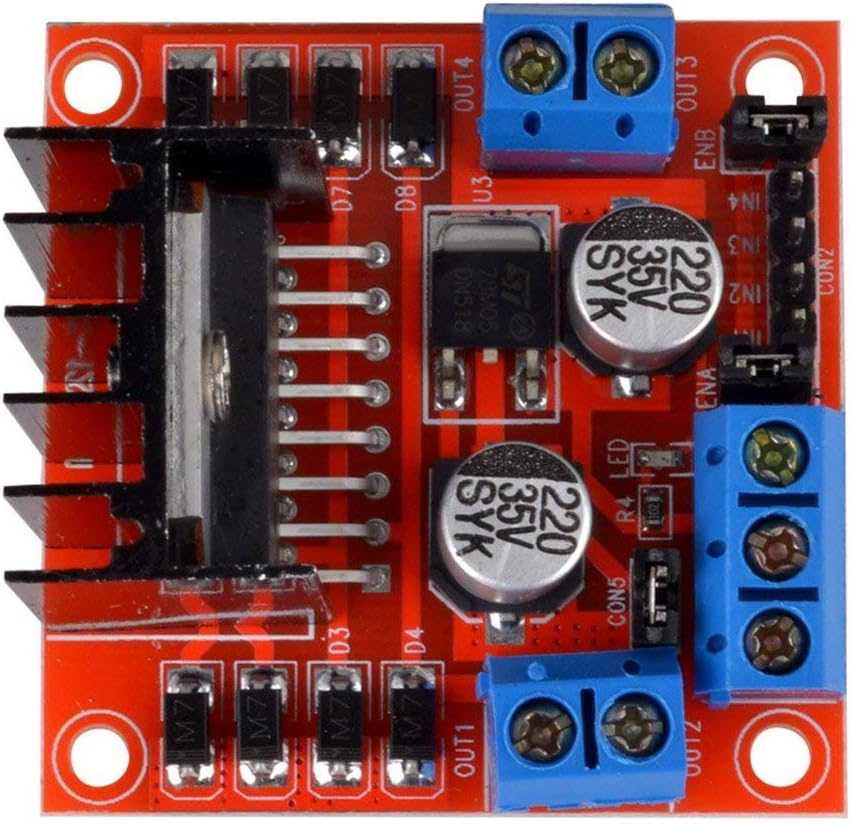
The L298N Motor Driver Controller Board Module, manufactured by HiLetgo, is a versatile and robust dual H-bridge motor driver. It allows for the control of the speed and direction of two DC motors or one stepper motor. This module is widely used in robotics, automation projects, and other applications requiring precise motor control.
Explore Projects Built with L298N Motor Driver Controller Board Module Stepper Motor
Arduino Mega 2560 Controlled Multi-Stepper Motor System with SIM800L GSM Module
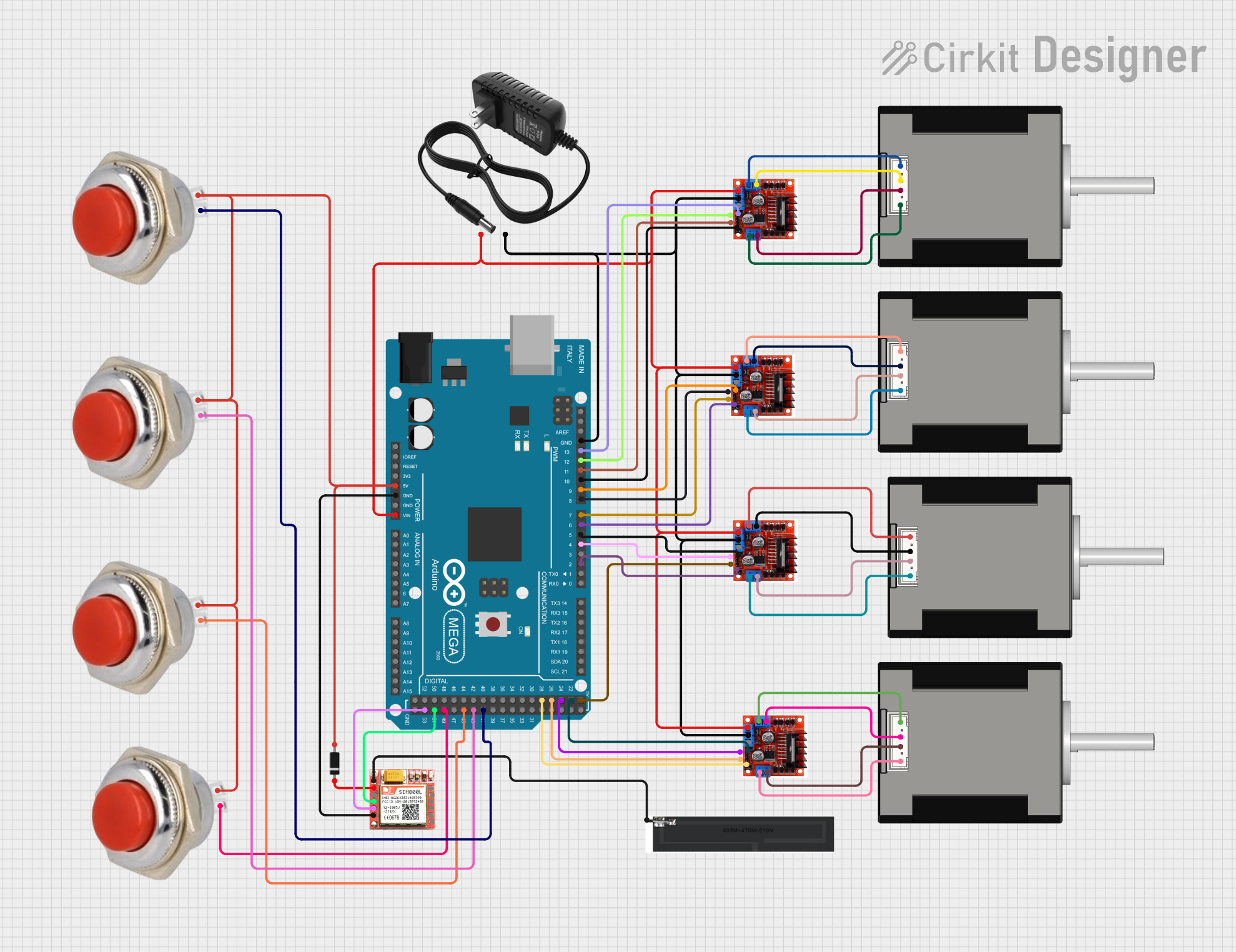
This circuit is designed to control multiple stepper motors using L298N motor driver modules, with an Arduino Mega 2560 serving as the central controller. It features remote communication capabilities via a SIM800L GSM module and user interaction through momentary switches. Protection or control flow is managed by diodes, and a 12V power supply powers the system.
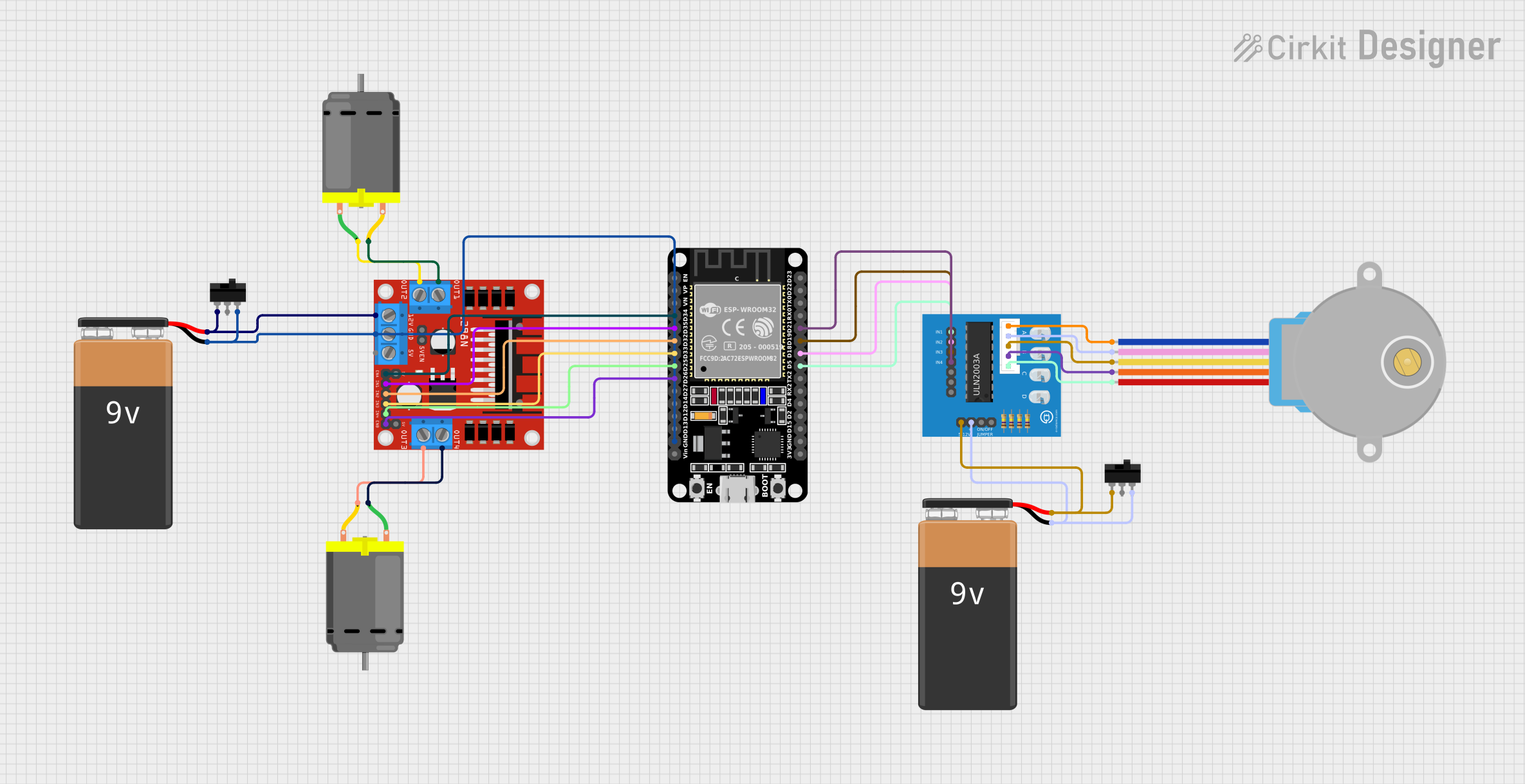
ESP32-Controlled Dual DC Motor & Stepper Motor Driver System
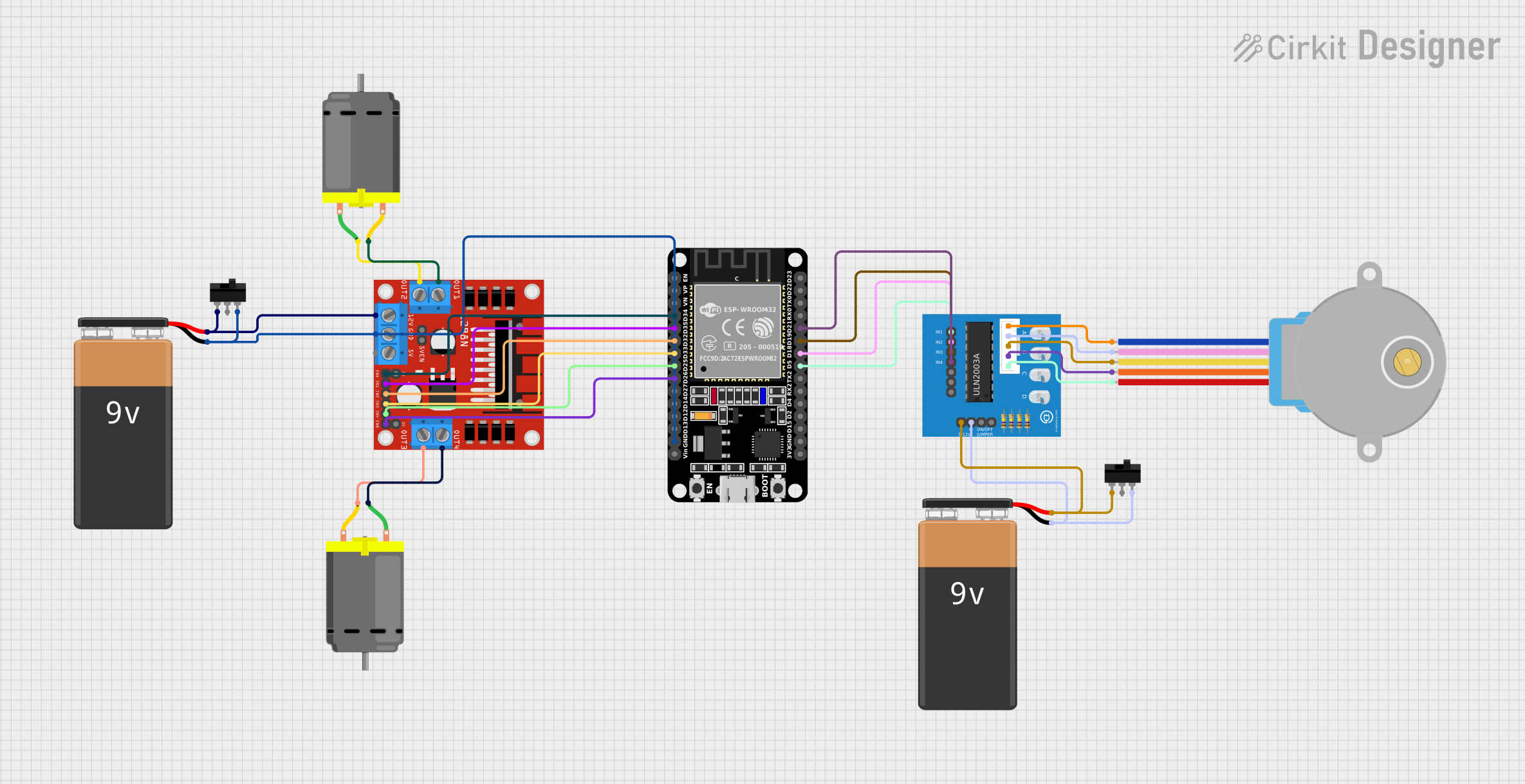
This circuit controls two DC motors and a stepper motor using an ESP32 microcontroller. The L298N motor driver interfaces with the ESP32 to drive the DC motors, allowing for directional control and speed regulation through PWM. Additionally, the ULN2003A breakout board is used to control the 28BYJ-48 stepper motor, with the ESP32 dictating the stepping sequence. Power is supplied by 9V batteries, with toggle switches to control power flow to the motor drivers.
ESP32-Controlled Dual Stepper Motor Driver System
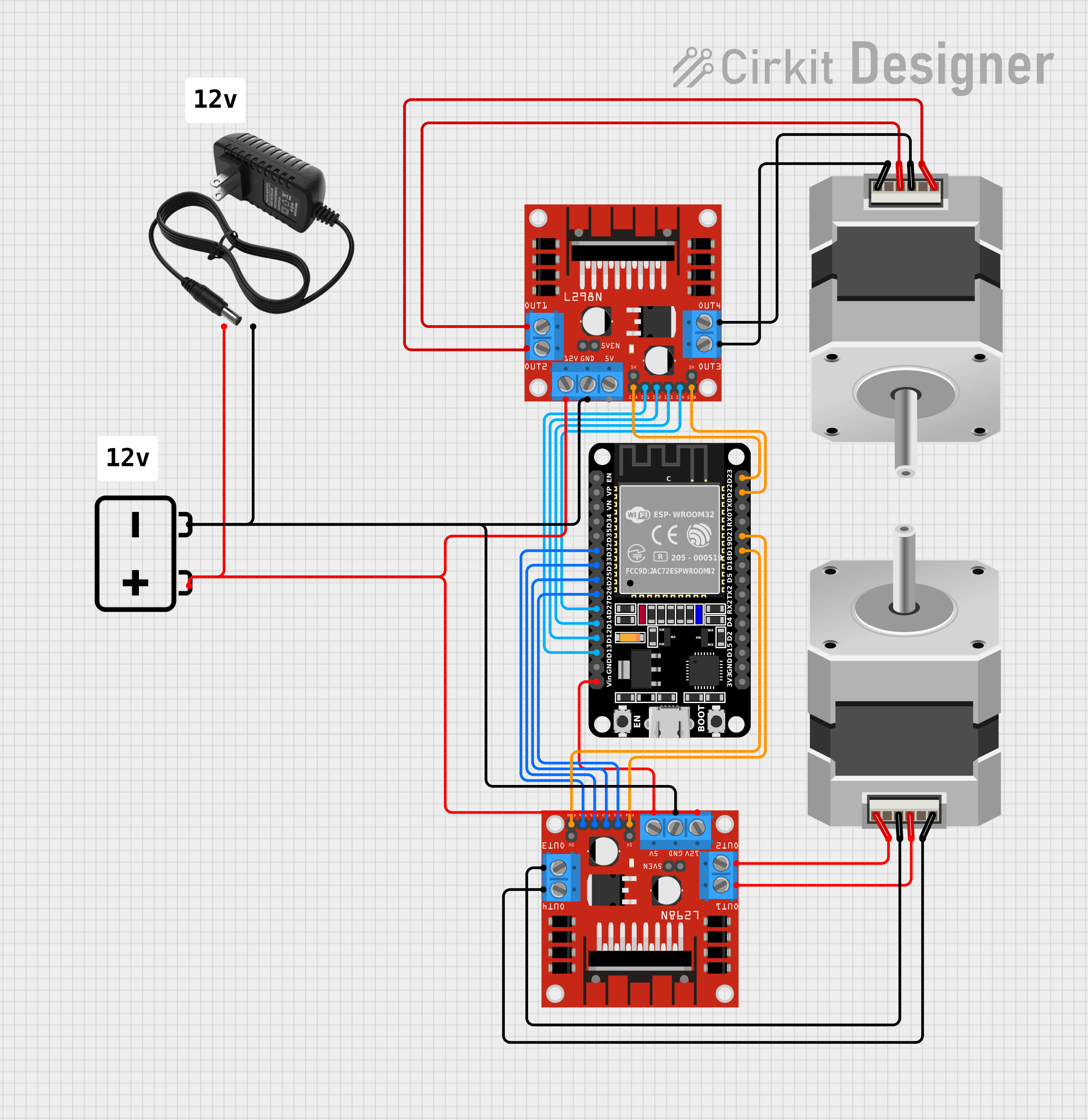
This circuit consists of two L298N DC motor drivers controlled by an ESP32 microcontroller to drive two bipolar stepper motors. The ESP32 uses its GPIO pins to send control signals to the motor drivers, which in turn power the stepper motors with a 12V supply from either a battery or a power supply. The circuit is designed for precise control of stepper motors, likely for applications requiring synchronized movements, such as robotics or CNC machines.
ESP32 and L298N Motor Driver Controlled DC and Stepper Motors with Toggle Switch and Battery Power
This circuit controls two DC motors and a stepper motor using an ESP32 microcontroller. The L298N motor driver is used to drive the DC motors, while the ULN2003A breakout board is used to control the stepper motor. The ESP32 is programmed to manage the motor operations, including direction and speed control.
Explore Projects Built with L298N Motor Driver Controller Board Module Stepper Motor
Arduino Mega 2560 Controlled Multi-Stepper Motor System with SIM800L GSM Module
This circuit is designed to control multiple stepper motors using L298N motor driver modules, with an Arduino Mega 2560 serving as the central controller. It features remote communication capabilities via a SIM800L GSM module and user interaction through momentary switches. Protection or control flow is managed by diodes, and a 12V power supply powers the system.
ESP32-Controlled Dual DC Motor & Stepper Motor Driver System
This circuit controls two DC motors and a stepper motor using an ESP32 microcontroller. The L298N motor driver interfaces with the ESP32 to drive the DC motors, allowing for directional control and speed regulation through PWM. Additionally, the ULN2003A breakout board is used to control the 28BYJ-48 stepper motor, with the ESP32 dictating the stepping sequence. Power is supplied by 9V batteries, with toggle switches to control power flow to the motor drivers.
ESP32-Controlled Dual Stepper Motor Driver System
This circuit consists of two L298N DC motor drivers controlled by an ESP32 microcontroller to drive two bipolar stepper motors. The ESP32 uses its GPIO pins to send control signals to the motor drivers, which in turn power the stepper motors with a 12V supply from either a battery or a power supply. The circuit is designed for precise control of stepper motors, likely for applications requiring synchronized movements, such as robotics or CNC machines.
ESP32 and L298N Motor Driver Controlled DC and Stepper Motors with Toggle Switch and Battery Power
This circuit controls two DC motors and a stepper motor using an ESP32 microcontroller. The L298N motor driver is used to drive the DC motors, while the ULN2003A breakout board is used to control the stepper motor. The ESP32 is programmed to manage the motor operations, including direction and speed control.
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Manufacturer | HiLetgo |
| Part ID | L298N |
| Operating Voltage | 5V to 35V |
| Output Current | 2A per channel (max 3A peak) |
| Power Dissipation | 25W |
| Logic Voltage | 5V |
| Control Logic | TTL |
| Dimensions | 43mm x 43mm x 27mm |
Pin Configuration and Descriptions
Power and Motor Connections
| Pin Name | Description |
|---|---|
| VCC | Motor power supply (5V to 35V) |
| GND | Ground |
| 5V | Logic power supply (5V) |
| OUT1 | Output 1 for Motor A |
| OUT2 | Output 2 for Motor A |
| OUT3 | Output 1 for Motor B |
| OUT4 | Output 2 for Motor B |
Control Pins
| Pin Name | Description |
|---|---|
| ENA | Enable pin for Motor A (PWM control) |
| IN1 | Input 1 for Motor A |
| IN2 | Input 2 for Motor A |
| ENB | Enable pin for Motor B (PWM control) |
| IN3 | Input 1 for Motor B |
| IN4 | Input 2 for Motor B |
Usage Instructions
How to Use the Component in a Circuit
Power Connections:
- Connect the VCC pin to the motor power supply (5V to 35V).
- Connect the GND pin to the ground of the power supply.
- Connect the 5V pin to the 5V output of your microcontroller (e.g., Arduino UNO).
Motor Connections:
- Connect the motor terminals to OUT1 and OUT2 for Motor A.
- Connect the motor terminals to OUT3 and OUT4 for Motor B.
Control Connections:
- Connect the ENA pin to a PWM-capable pin on your microcontroller for Motor A speed control.
- Connect the IN1 and IN2 pins to digital pins on your microcontroller for Motor A direction control.
- Connect the ENB pin to a PWM-capable pin on your microcontroller for Motor B speed control.
- Connect the IN3 and IN4 pins to digital pins on your microcontroller for Motor B direction control.
Important Considerations and Best Practices
- Ensure that the power supply voltage does not exceed the maximum rating of 35V.
- Use appropriate heat sinks or cooling mechanisms if the module is operating near its maximum current rating.
- Use PWM signals to control the speed of the motors for smoother operation.
- Double-check all connections before powering up the module to avoid damage.
Example Code for Arduino UNO
// Define motor control pins
#define ENA 9
#define IN1 8
#define IN2 7
#define ENB 3
#define IN3 5
#define IN4 4
void setup() {
// Set all the motor control pins to outputs
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
// Motor A forward
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 255); // Full speed
// Motor B backward
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 255); // Full speed
delay(2000); // Run for 2 seconds
// Stop both motors
analogWrite(ENA, 0);
analogWrite(ENB, 0);
delay(2000); // Wait for 2 seconds
}
Troubleshooting and FAQs
Common Issues Users Might Face
Motor Not Running:
- Check all power and ground connections.
- Ensure the control pins are correctly connected and configured.
- Verify that the motor power supply voltage is within the specified range.
Overheating:
- Ensure proper heat dissipation with heat sinks or cooling fans.
- Reduce the load on the motors if they are drawing too much current.
Erratic Motor Behavior:
- Check for loose or faulty connections.
- Ensure that the PWM signals are correctly generated and applied.
Solutions and Tips for Troubleshooting
- Double-Check Connections: Ensure all connections are secure and correctly placed.
- Use a Multimeter: Measure voltages at various points to ensure proper power delivery.
- Consult the Datasheet: Refer to the L298N datasheet for detailed technical information and troubleshooting tips.
By following this documentation, users can effectively utilize the L298N Motor Driver Controller Board Module in their projects, ensuring reliable and efficient motor control.