How to Use EBB36: Examples, Pinouts, and Specs
Introduction
The EBB36 by BigTreeTech is a versatile electronic circuit board designed for use in embedded systems. It serves as a control and interface module, enabling seamless communication between various electronic components. With its compact design and robust functionality, the EBB36 is ideal for applications requiring precise control, such as 3D printers, CNC machines, and robotics.
Explore Projects Built with EBB36


Explore Projects Built with EBB36
Common Applications and Use Cases
- 3D Printing: Used as a control board for stepper motors and sensors.
- CNC Machines: Facilitates precise motor control and signal processing.
- Robotics: Acts as an interface for sensors, actuators, and microcontrollers.
- IoT Devices: Enables communication between sensors and cloud-based systems.
- Prototyping: Ideal for testing and developing embedded systems.
Technical Specifications
The EBB36 is designed to provide reliable performance in a variety of applications. Below are its key technical details:
Key Technical Details
- Manufacturer: BigTreeTech
- Part ID: EBB36
- Input Voltage: 12V to 24V DC
- Communication Protocols: UART, I2C
- Microcontroller: STM32 series (specific model may vary)
- Stepper Motor Driver Support: Compatible with TMC series drivers
- Dimensions: 36mm x 36mm
- Mounting: M3 screw holes for secure installation
- Operating Temperature: -20°C to 70°C
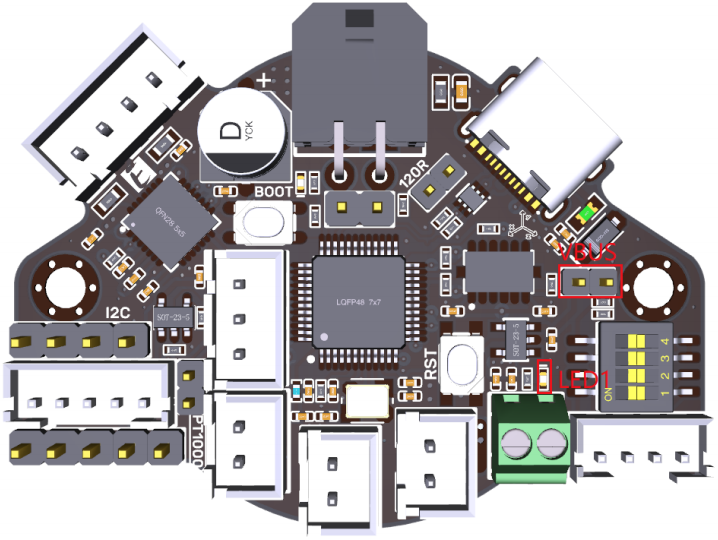
Pin Configuration and Descriptions
The EBB36 features a well-organized pin layout for easy integration. Below is the pin configuration:
| Pin Name | Type | Description |
|---|---|---|
| VCC | Power Input | Main power input (12V-24V DC). |
| GND | Ground | Ground connection for the circuit. |
| TX | UART Output | Transmit pin for UART communication. |
| RX | UART Input | Receive pin for UART communication. |
| SCL | I2C Clock | Serial clock line for I2C communication. |
| SDA | I2C Data | Serial data line for I2C communication. |
| EN | Enable Input | Enable pin for stepper motor driver. |
| DIR | Direction Input | Controls the direction of the stepper motor. |
| STEP | Step Input | Step signal input for the stepper motor. |
| GPIO1 | General I/O | Configurable general-purpose input/output pin. |
| GPIO2 | General I/O | Configurable general-purpose input/output pin. |
Usage Instructions
The EBB36 is straightforward to use in embedded systems. Follow the steps below to integrate it into your project:
How to Use the EBB36 in a Circuit
- Power Connection: Connect the VCC pin to a 12V-24V DC power source and the GND pin to ground.
- Communication Setup:
- For UART communication, connect the TX and RX pins to the corresponding pins on your microcontroller.
- For I2C communication, connect the SCL and SDA pins to the I2C bus of your microcontroller.
- Motor Control:
- Connect the EN, DIR, and STEP pins to the stepper motor driver.
- Ensure the motor driver is compatible with the EBB36 (e.g., TMC series).
- GPIO Configuration: Use GPIO1 and GPIO2 for additional input/output functionality as needed.
- Mounting: Secure the EBB36 to your project using M3 screws.
Important Considerations and Best Practices
- Voltage Compatibility: Ensure the power supply voltage matches the EBB36's input range (12V-24V DC).
- Signal Integrity: Use short, shielded cables for UART and I2C connections to minimize noise.
- Heat Management: If operating in high-temperature environments, consider adding a heatsink or active cooling.
- Firmware Updates: Check for firmware updates from BigTreeTech to ensure optimal performance.
Example: Using EBB36 with Arduino UNO
Below is an example of how to use the EBB36 with an Arduino UNO for stepper motor control:
// Example: Controlling a stepper motor with EBB36 and Arduino UNO
#define EN_PIN 2 // Connect to EN pin on EBB36
#define DIR_PIN 3 // Connect to DIR pin on EBB36
#define STEP_PIN 4 // Connect to STEP pin on EBB36
void setup() {
pinMode(EN_PIN, OUTPUT); // Set EN pin as output
pinMode(DIR_PIN, OUTPUT); // Set DIR pin as output
pinMode(STEP_PIN, OUTPUT);// Set STEP pin as output
digitalWrite(EN_PIN, LOW); // Enable the stepper motor driver
}
void loop() {
digitalWrite(DIR_PIN, HIGH); // Set direction to clockwise
for (int i = 0; i < 200; i++) { // Rotate motor 200 steps
digitalWrite(STEP_PIN, HIGH); // Generate step pulse
delayMicroseconds(1000); // Wait 1ms
digitalWrite(STEP_PIN, LOW); // End step pulse
delayMicroseconds(1000); // Wait 1ms
}
delay(1000); // Wait 1 second
digitalWrite(DIR_PIN, LOW); // Set direction to counterclockwise
for (int i = 0; i < 200; i++) { // Rotate motor 200 steps
digitalWrite(STEP_PIN, HIGH); // Generate step pulse
delayMicroseconds(1000); // Wait 1ms
digitalWrite(STEP_PIN, LOW); // End step pulse
delayMicroseconds(1000); // Wait 1ms
}
delay(1000); // Wait 1 second
}
Troubleshooting and FAQs
Common Issues and Solutions
No Power to the Board:
- Cause: Incorrect power supply voltage or loose connections.
- Solution: Verify the power supply voltage is within the 12V-24V range and check all connections.
Stepper Motor Not Moving:
- Cause: Incorrect wiring or missing step pulses.
- Solution: Double-check the connections to the EN, DIR, and STEP pins. Ensure the Arduino code is generating step pulses.
Communication Failure:
- Cause: Incorrect UART or I2C connections.
- Solution: Verify the TX/RX or SCL/SDA connections and ensure the baud rate or I2C address matches.
Overheating:
- Cause: High current draw or poor ventilation.
- Solution: Reduce the load on the board or add a heatsink/fan for cooling.
FAQs
Q: Can the EBB36 be used with 5V logic microcontrollers?
A: Yes, but you may need level shifters for proper communication.Q: Is the EBB36 compatible with TMC2209 drivers?
A: Yes, the EBB36 is designed to work with TMC series drivers, including the TMC2209.Q: How do I update the firmware on the EBB36?
A: Refer to BigTreeTech's official documentation for firmware update instructions.Q: Can I use the EBB36 for DC motor control?
A: The EBB36 is optimized for stepper motors, but it can be adapted for DC motors with additional circuitry.