How to Use Adafruit LSM9DS1 9DoF Breakout Stemma QT: Examples, Pinouts, and Specs
Introduction
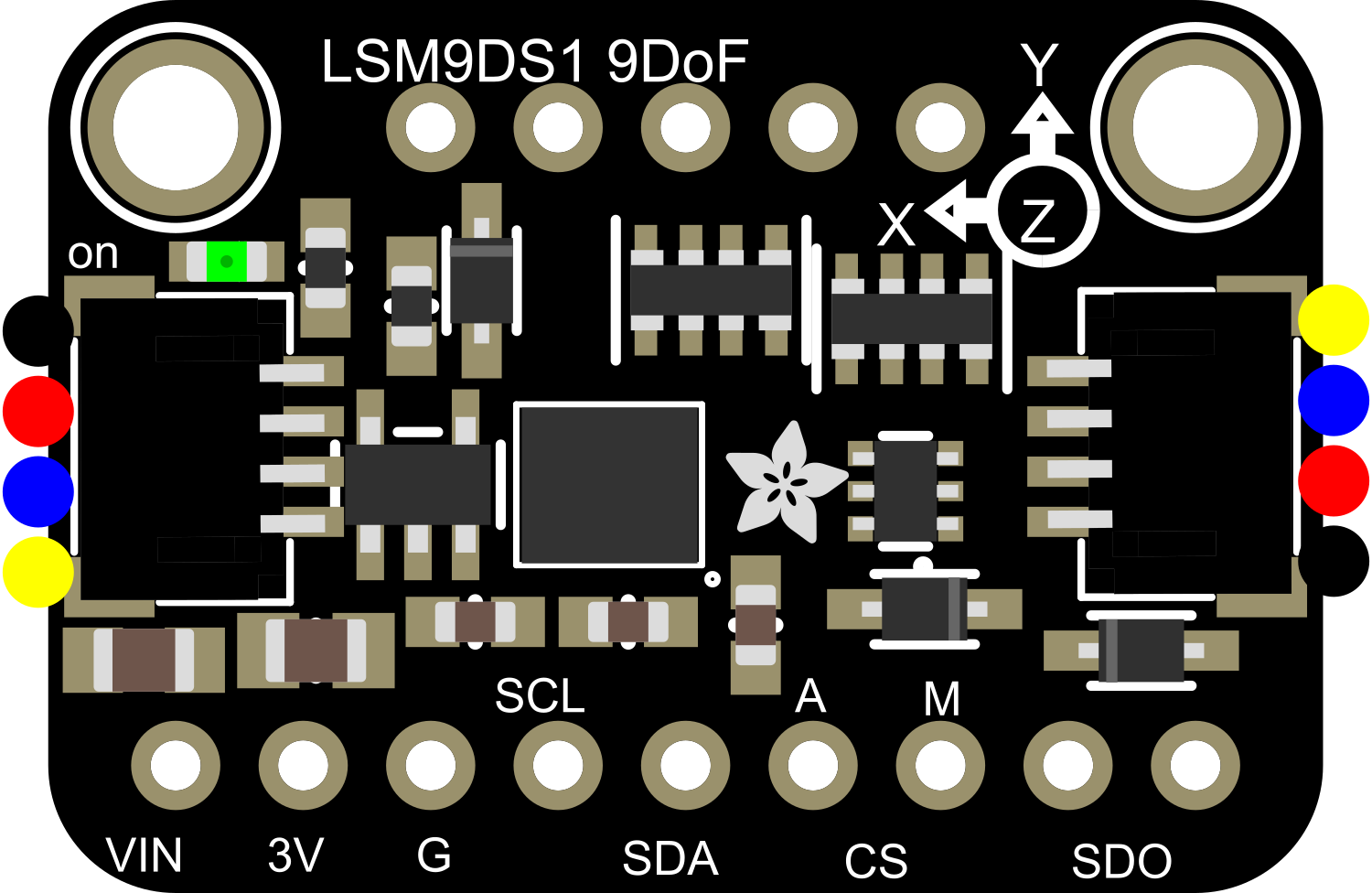
The Adafruit LSM9DS1 9DoF Breakout with Stemma QT connectors is a versatile, all-in-one sensor module that provides motion, orientation, and magnetic readings. This breakout board combines a 3-axis accelerometer, a 3-axis gyroscope, and a 3-axis magnetometer onto a single board, offering nine degrees of freedom (9DoF) for comprehensive motion and orientation data. It is ideal for applications in robotics, wearable devices, motion tracking, and any project where you need to measure movement, orientation, or magnetic fields.
Explore Projects Built with Adafruit LSM9DS1 9DoF Breakout Stemma QT
Explore Projects Built with Adafruit LSM9DS1 9DoF Breakout Stemma QT
Technical Specifications
Key Technical Details
- Supply Voltage (VDD): 2.4V to 3.6V
- Interface Voltage (VDDIO): 1.8V to 3.6V
- Accelerometer Range: ±2/±4/±8/±16 g
- Gyroscope Range: ±245/±500/±2000 dps (degrees per second)
- Magnetometer Range: ±4/±8/±12/±16 gauss
- Operating Current: 6.1 mA (typical)
- Communication: I2C and SPI
- Operating Temperature Range: -40°C to +85°C
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VIN | Supply voltage input (2.4V to 3.6V) |
| 2 | 3Vo | 3.3V output from the voltage regulator |
| 3 | GND | Ground connection |
| 4 | SCL | I2C clock (also SPI SCL) |
| 5 | SDA | I2C data (also SPI SDA) |
| 6 | SDO/SA0 | SPI data output (also I2C SA0) |
| 7 | CSAG | Chip select for the accelerometer and gyroscope |
| 8 | CSM | Chip select for the magnetometer |
| 9 | SDA1 | Secondary I2C data (for Stemma QT connector) |
| 10 | SCL1 | Secondary I2C clock (for Stemma QT connector) |
Usage Instructions
Integration into a Circuit
To use the LSM9DS1 breakout in a circuit:
- Connect VIN to a 2.4V to 3.6V power supply.
- Connect GND to the ground of your power supply.
- For I2C communication, connect SCL to the I2C clock and SDA to the I2C data lines. If using SPI, connect the respective SPI pins.
- If using I2C, ensure that the SDO/SA0 pin is correctly configured to set the I2C address.
- For SPI, connect CSAG and CSM to your microcontroller's chip select pins.
Best Practices
- Use pull-up resistors on the I2C lines if they are not already present on your microcontroller board.
- Ensure that the power supply is stable and within the specified voltage range.
- When using SPI, ensure that the chip select lines are correctly managed to avoid communication conflicts.
Example Code for Arduino UNO
Below is an example of how to interface the LSM9DS1 with an Arduino UNO using I2C:
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_LSM9DS1.h>
// Create an instance of the LSM9DS1 class
Adafruit_LSM9DS1 lsm = Adafruit_LSM9DS1();
void setup() {
Serial.begin(115200);
// Initialize the sensor
if (!lsm.begin()) {
Serial.println("Failed to initialize LSM9DS1. Check your wiring!");
while (1);
}
// Configure the sensor
lsm.setupAccel(lsm.LSM9DS1_ACCELRANGE_2G);
lsm.setupMag(lsm.LSM9DS1_MAGGAIN_4GAUSS);
lsm.setupGyro(lsm.LSM9DS1_GYROSCALE_245DPS);
}
void loop() {
// Read the sensor
lsm.read();
// Print accelerometer data
Serial.print("Accel X: "); Serial.print(lsm.accelData.x); Serial.print(" ");
Serial.print("Y: "); Serial.print(lsm.accelData.y); Serial.print(" ");
Serial.print("Z: "); Serial.println(lsm.accelData.z);
// Print gyroscope data
Serial.print("Gyro X: "); Serial.print(lsm.gyroData.x); Serial.print(" ");
Serial.print("Y: "); Serial.print(lsm.gyroData.y); Serial.print(" ");
Serial.print("Z: "); Serial.println(lsm.gyroData.z);
// Print magnetometer data
Serial.print("Mag X: "); Serial.print(lsm.magData.x); Serial.print(" ");
Serial.print("Y: "); Serial.print(lsm.magData.y); Serial.print(" ");
Serial.print("Z: "); Serial.println(lsm.magData.z);
// Delay before the next reading
delay(1000);
}
This code initializes the LSM9DS1 sensor and configures its accelerometer, magnetometer, and gyroscope with basic settings. It then reads the sensor data and prints it to the Serial Monitor.
Troubleshooting and FAQs
Common Issues
- Sensor not detected: Ensure that the wiring is correct, and the power supply is within the specified range. Check the I2C address if using I2C communication.
- Inaccurate readings: Calibrate the sensor as per the datasheet instructions and ensure that there are no magnetic interferences nearby.
- No data on Serial Monitor: Confirm that the correct baud rate is set in the Serial Monitor and that the Arduino board is connected to the correct COM port.
FAQs
Q: Can I use this sensor with a 5V microcontroller? A: Yes, but ensure that the logic level for the I2C or SPI communication is within the sensor's specified range (1.8V to 3.6V).
Q: How do I change the I2C address? A: The I2C address can be changed by connecting the SDO/SA0 pin to either ground or VDD.
Q: Can I use multiple LSM9DS1 sensors on the same I2C bus? A: Yes, you can use multiple sensors by assigning different I2C addresses to each sensor using the SDO/SA0 pin.
For further assistance, consult the Adafruit LSM9DS1 datasheet and the Adafruit support forums.