How to Use TMC2226 Stepper Driver: Examples, Pinouts, and Specs
Introduction
The TMC2226 is a high-performance stepper motor driver manufactured by Trinamic Motion Control (TMC). It is designed to drive bipolar stepper motors in various applications, including 3D printers, CNC machines, and robotics. The TMC2226 offers advanced features such as stealthChop2 for silent operation and spreadCycle for high-speed motion, making it a popular choice for precision motion control.
Explore Projects Built with TMC2226 Stepper Driver
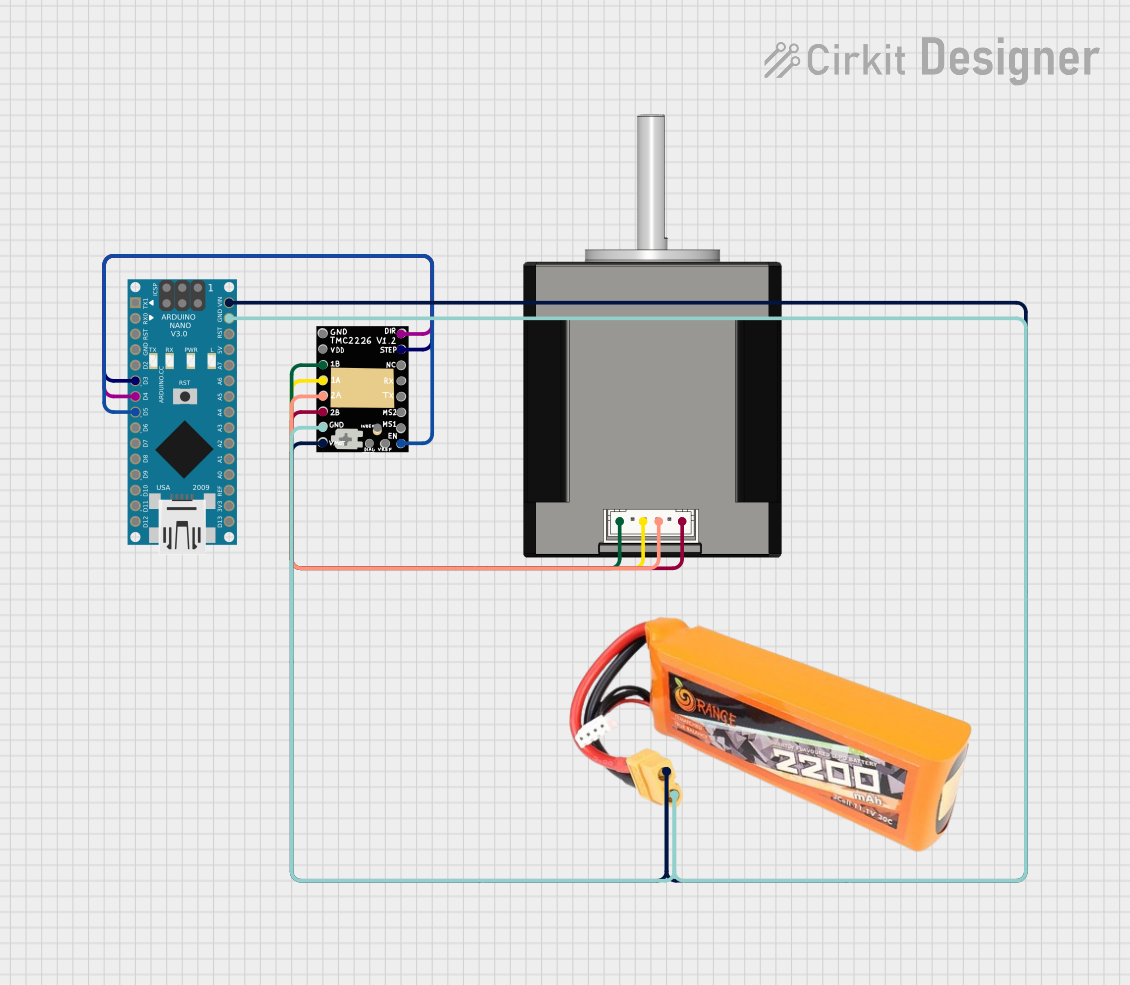
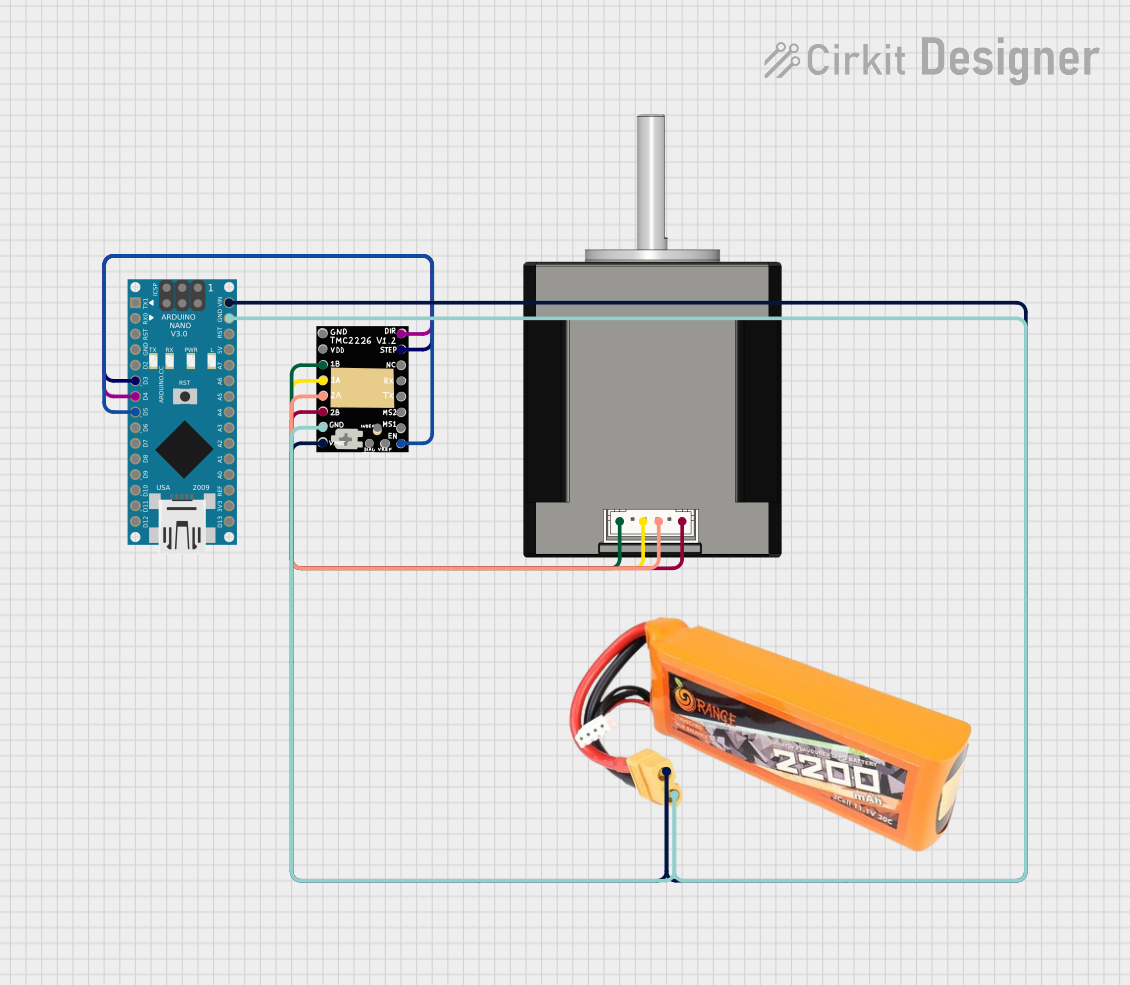
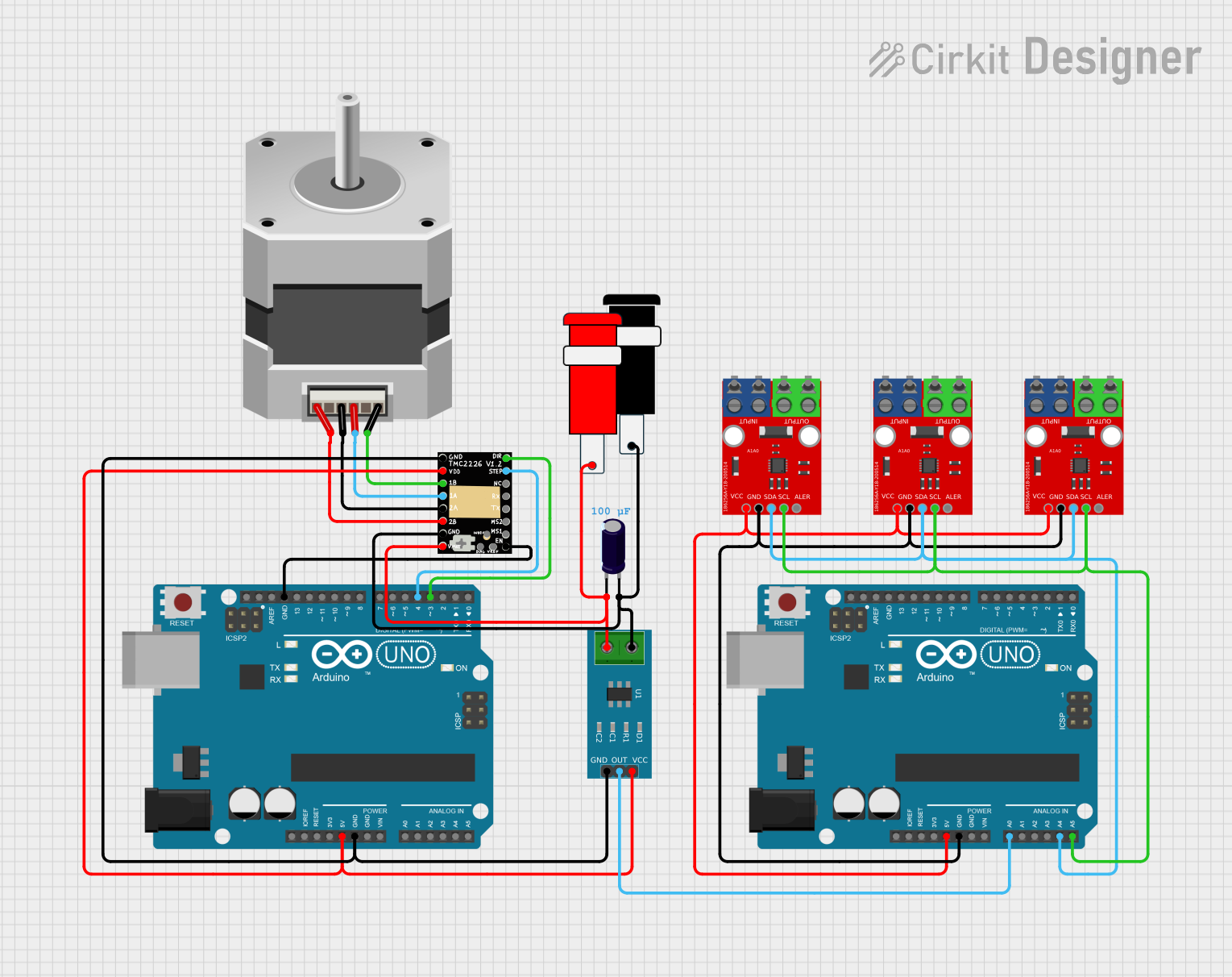

Explore Projects Built with TMC2226 Stepper Driver
Common Applications and Use Cases
- 3D Printers
- CNC Machines
- Robotics
- Precision Positioning Systems
- Office Automation
Technical Specifications
Key Technical Details
- Supply Voltage (VM): 4.75V to 29V
- Output Current (RMS): Up to 2.0A
- Output Current (Peak): Up to 2.8A
- Logic Voltage (VIO): 3.3V to 5V
- Microstepping: Up to 1/256
- Interface: Step/Dir or UART
- Integrated Protections: Over-temperature, short-circuit, under-voltage lockout
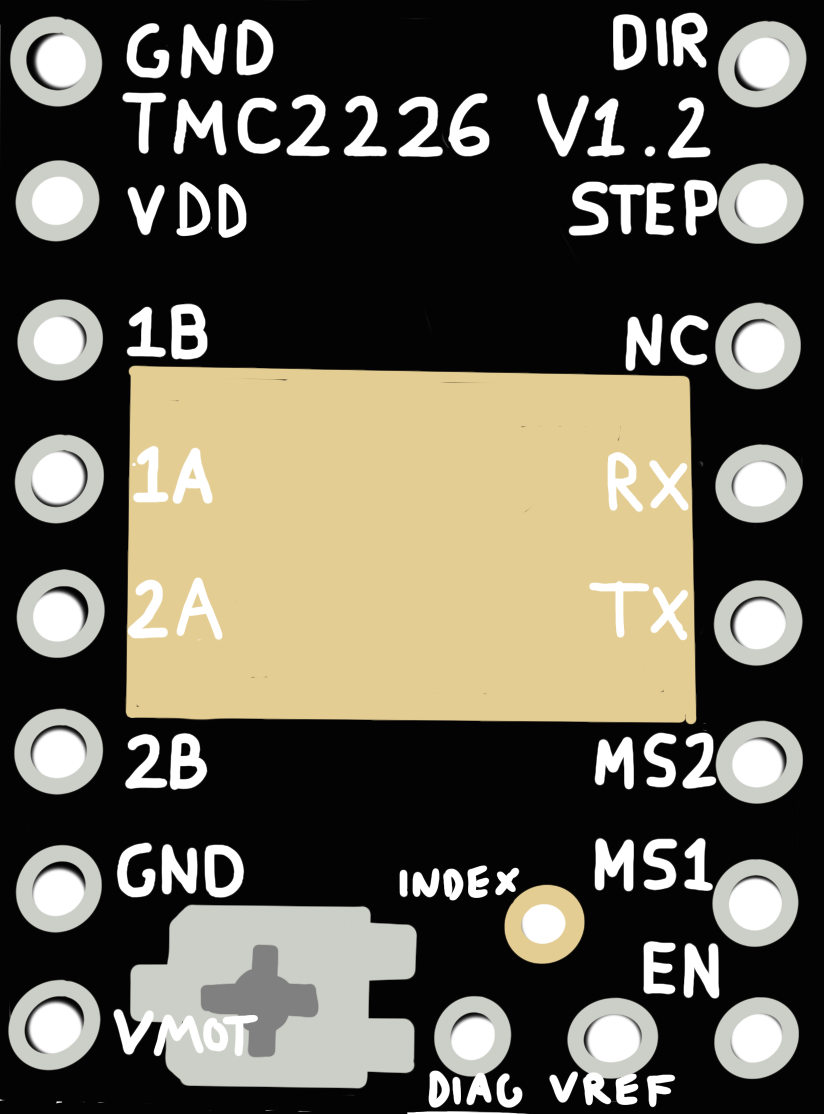
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | GND | Ground connection |
| 2 | VM | Motor supply voltage (4.75V to 29V) |
| 3 | EN | Enable motor output (active low) |
| 4 | MS1 | Microstep selection 1 |
| 5 | MS2 | Microstep selection 2 |
| 6 | DIAG | Diagnostic output / Stall detection |
| 7 | INDEX | Index output |
| 8 | STEP | Step input |
| 9 | DIR | Direction input |
| 10 | UART | UART interface for advanced configuration |
| 11 | VIO | Logic supply voltage (3.3V to 5V) |
| 12 | GND | Ground connection |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect the motor supply voltage (VM) to a suitable power source between 4.75V and 29V, and connect the logic voltage (VIO) to a 3.3V or 5V source.
- Motor Connection: Connect the stepper motor wires to the motor outputs on the TMC2226.
- Control Signals: Connect the STEP and DIR pins to the respective outputs on your microcontroller or motion controller.
- Microstepping Configuration: Set the MS1 and MS2 pins according to the desired microstepping resolution.
- Enable: The EN pin must be pulled low to enable the motor outputs.
Important Considerations and Best Practices
- Ensure that the power supply voltage does not exceed the maximum rating of 29V.
- Use proper decoupling capacitors close to the VM and VIO pins to minimize voltage spikes.
- Configure the current limit according to the motor specifications to prevent damage.
- Heat sinking may be necessary for high-current applications.
- For silent operation, enable stealthChop2 mode via UART configuration.
Troubleshooting and FAQs
Common Issues Users Might Face
- Motor not moving: Check the power supply, motor connections, and that the EN pin is active.
- Overheating: Ensure proper current settings and heat sinking.
- Noise during operation: Adjust stealthChop2 and spreadCycle settings for optimal performance.
Solutions and Tips for Troubleshooting
- Verify all connections and solder joints.
- Use a multimeter to check the supply voltage at the VM and VIO pins.
- Ensure that the microcontroller is sending the correct step and direction signals.
- Consult the TMC2226 datasheet for detailed configuration options.
FAQs
Q: Can I control the TMC2226 using an Arduino UNO? A: Yes, the TMC2226 can be controlled with an Arduino UNO using digital I/O pins for STEP and DIR signals.
Q: What is the maximum current the TMC2226 can handle? A: The TMC2226 can handle up to 2.0A RMS per phase without additional cooling.
Q: How do I enable UART mode for advanced configurations? A: UART mode can be enabled by connecting the UART pin to a serial interface on your controller and configuring the driver through software.
Example Code for Arduino UNO
#include <TMCStepper.h>
#define EN_PIN 8 // Enable
#define DIR_PIN 5 // Direction
#define STEP_PIN 6 // Step
#define SERIAL_PORT Serial1 // TMC2226 Serial port
#define DRIVER_ADDRESS 0b00 // TMC2226 Driver address according to MS1 and MS2
TMC2208Stepper driver(&SERIAL_PORT, DRIVER_ADDRESS);
void setup() {
pinMode(EN_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
pinMode(STEP_PIN, OUTPUT);
digitalWrite(EN_PIN, LOW); // Enable driver in active low
SERIAL_PORT.begin(115200); // Initialize serial port for driver communication
driver.begin(); // Initialize driver
driver.rms_current(1000); // Set RMS current
driver.microsteps(16); // Set microsteps to 1/16th
driver.en_spreadCycle(false); // Enable stealthChop for silent operation
}
void loop() {
digitalWrite(DIR_PIN, HIGH); // Set direction
for (int i = 0; i < 200; i++) {
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(100);
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(100);
}
delay(1000); // Wait 1 second
}
Note: The above code is a basic example to get started with the TMC2226 using an Arduino UNO. It assumes the use of the TMCStepper library for simplified control of Trinamic drivers. Adjust the current settings and microstepping according to your specific motor's requirements. Always refer to the TMC2226 datasheet for detailed information on configuring and using the driver.