How to Use compass: Examples, Pinouts, and Specs
Introduction
A compass is a navigational instrument that shows directions relative to the Earth's magnetic poles. It typically consists of a magnetized needle that aligns itself with the Earth's magnetic field, indicating north. In electronics, digital compasses (magnetometers) are widely used for navigation, robotics, and orientation detection. These devices measure the Earth's magnetic field and provide directional data in digital form.
Explore Projects Built with compass

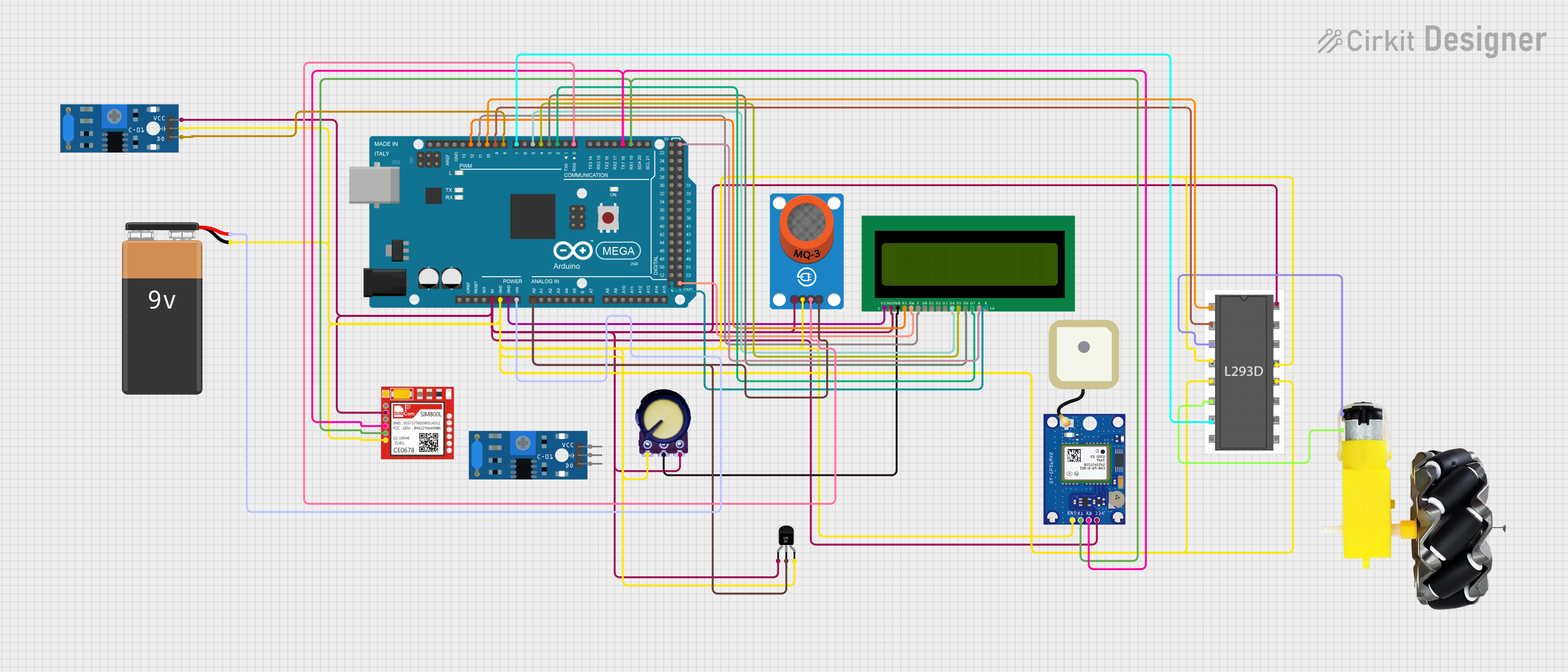
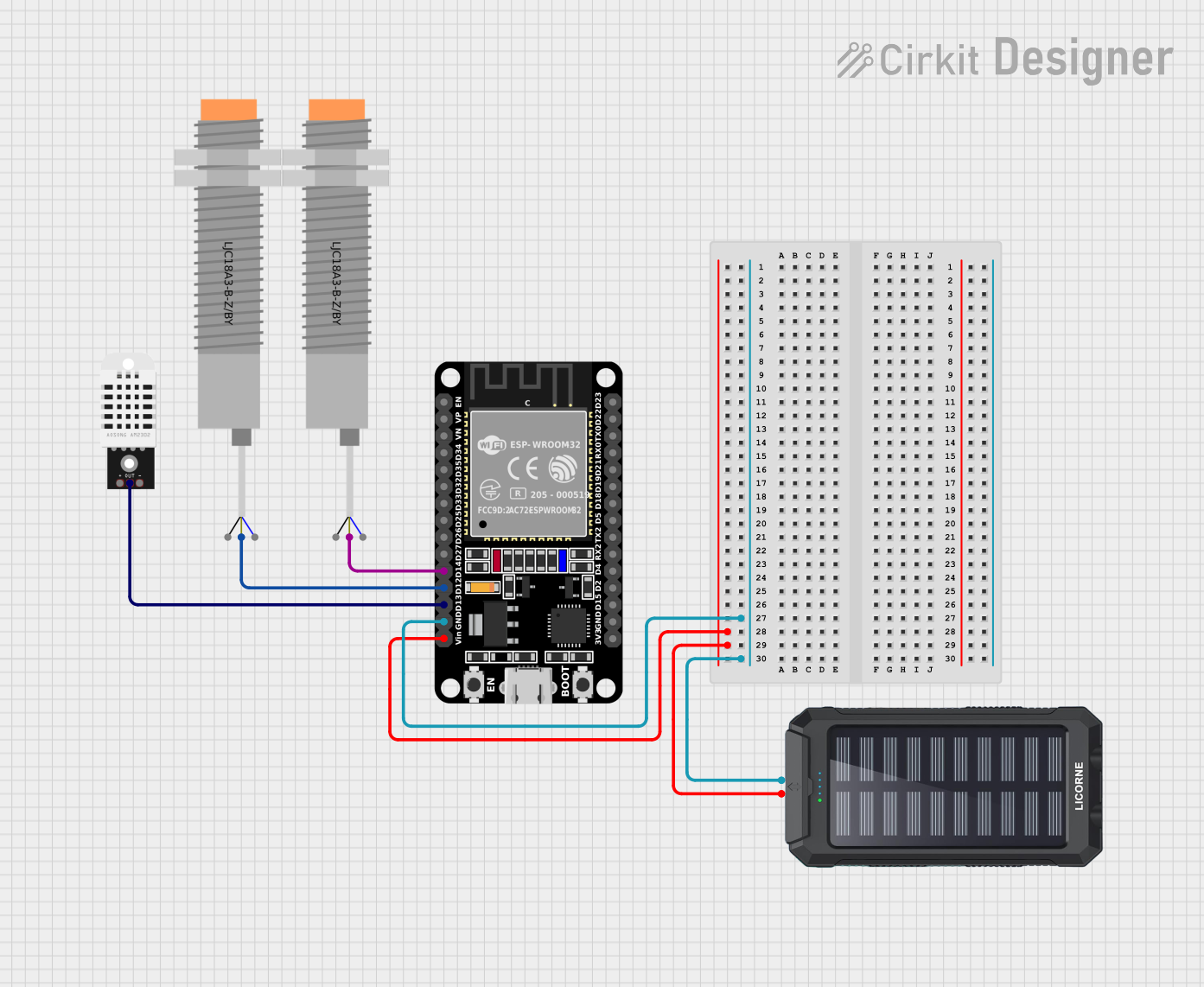

Explore Projects Built with compass
Common Applications and Use Cases
- Navigation systems in drones, robots, and vehicles
- Orientation detection in smartphones and wearable devices
- Geographic positioning in outdoor equipment
- Augmented reality applications
- Scientific experiments and magnetic field mapping
Technical Specifications
Below are the general technical specifications for a digital compass module, such as the HMC5883L, a commonly used 3-axis magnetometer:
| Parameter | Value |
|---|---|
| Operating Voltage | 3.0V to 5.0V |
| Operating Current | 100 µA (typical) |
| Measurement Range | ±1.3 to ±8 Gauss |
| Communication Interface | I2C |
| Resolution | 12-bit ADC |
| Output Data Rate | 0.75 Hz to 75 Hz |
| Operating Temperature | -40°C to +85°C |
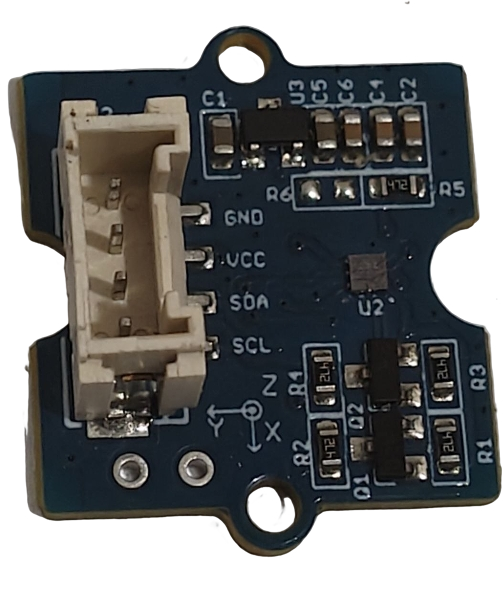
Pin Configuration and Descriptions
The following table describes the pinout for a typical digital compass module (e.g., HMC5883L):
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (3.0V to 5.0V). Connect to the power source. |
| 2 | GND | Ground. Connect to the ground of the circuit. |
| 3 | SCL | Serial Clock Line for I2C communication. Connect to the SCL pin of the microcontroller. |
| 4 | SDA | Serial Data Line for I2C communication. Connect to the SDA pin of the microcontroller. |
Usage Instructions
How to Use the Compass in a Circuit
- Power the Module: Connect the VCC pin to a 3.3V or 5V power source and the GND pin to the ground.
- Connect I2C Lines: Connect the SCL and SDA pins to the corresponding I2C pins on your microcontroller (e.g., Arduino UNO).
- Pull-Up Resistors: Ensure that the I2C lines (SCL and SDA) have pull-up resistors (typically 4.7kΩ) if not already included on the module.
- Initialize Communication: Use the appropriate library or code to initialize I2C communication and configure the compass.
Important Considerations and Best Practices
- Avoid Magnetic Interference: Keep the compass away from ferromagnetic materials and electronic devices that generate strong magnetic fields.
- Calibrate the Compass: Perform a calibration routine to account for local magnetic distortions and improve accuracy.
- Use Proper Orientation: Mount the compass module flat and ensure it is aligned with the desired reference axis.
- Power Supply Stability: Use a stable power source to avoid noise in the measurements.
Example Code for Arduino UNO
Below is an example code to interface the HMC5883L compass module with an Arduino UNO:
#include <Wire.h> // Include the Wire library for I2C communication
#define HMC5883L_ADDRESS 0x1E // I2C address of the HMC5883L module
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial communication for debugging
// Initialize the HMC5883L module
Wire.beginTransmission(HMC5883L_ADDRESS);
Wire.write(0x00); // Select configuration register A
Wire.write(0x70); // Set measurement mode to normal and data rate to 15 Hz
Wire.endTransmission();
Wire.beginTransmission(HMC5883L_ADDRESS);
Wire.write(0x02); // Select mode register
Wire.write(0x00); // Set continuous measurement mode
Wire.endTransmission();
}
void loop() {
int16_t x, y, z;
// Request data from the HMC5883L module
Wire.beginTransmission(HMC5883L_ADDRESS);
Wire.write(0x03); // Select data output register
Wire.endTransmission();
Wire.requestFrom(HMC5883L_ADDRESS, 6); // Request 6 bytes of data
if (Wire.available() == 6) {
x = (Wire.read() << 8) | Wire.read(); // Combine MSB and LSB for X-axis
z = (Wire.read() << 8) | Wire.read(); // Combine MSB and LSB for Z-axis
y = (Wire.read() << 8) | Wire.read(); // Combine MSB and LSB for Y-axis
}
// Calculate heading
float heading = atan2(y, x) * 180 / PI;
if (heading < 0) {
heading += 360; // Ensure heading is positive
}
// Print the heading to the Serial Monitor
Serial.print("Heading: ");
Serial.print(heading);
Serial.println("°");
delay(500); // Wait for 500ms before the next reading
}
Troubleshooting and FAQs
Common Issues and Solutions
No Data or Incorrect Readings:
- Ensure the module is powered correctly and the I2C connections are secure.
- Verify the I2C address of the module (default is 0x1E for HMC5883L).
- Check for magnetic interference near the module.
Inconsistent or Fluctuating Readings:
- Perform a calibration routine to account for local magnetic distortions.
- Use a stable power supply to minimize noise.
I2C Communication Errors:
- Ensure pull-up resistors are present on the SDA and SCL lines.
- Check the wiring and ensure the correct pins are connected.
FAQs
Q: Can I use the compass module with a 3.3V microcontroller?
A: Yes, most compass modules like the HMC5883L support both 3.3V and 5V logic levels.
Q: How do I calibrate the compass?
A: Calibration typically involves rotating the compass in all directions while collecting data. Use a calibration library or algorithm to process the data and correct for offsets.
Q: What is the maximum range of the compass?
A: The HMC5883L can measure magnetic fields in the range of ±1.3 to ±8 Gauss, depending on the configuration.
Q: Can the compass detect tilt or roll?
A: No, the compass only measures magnetic fields. For tilt or roll detection, combine it with an accelerometer or gyroscope.