How to Use QTR-8A: Examples, Pinouts, and Specs

Introduction
The QTR-8A, manufactured by Pololu, is an array of eight infrared (IR) emitter and detector pairs designed for line sensing and object detection. This versatile sensor module outputs analog signals corresponding to the reflectance detected by each sensor, making it ideal for robotics and automation applications. The QTR-8A is commonly used in line-following robots, edge detection systems, and object tracking.
Explore Projects Built with QTR-8A
Explore Projects Built with QTR-8A
Common Applications
- Line-following robots
- Edge detection in robotic navigation
- Object detection and tracking
- Industrial automation systems
- Position sensing in conveyor belts
Technical Specifications
The QTR-8A sensor array is designed for ease of use and high performance. Below are its key technical details:
General Specifications
- Operating Voltage: 3.3V to 5V
- Current Consumption: ~100 mA (with all emitters on)
- Output Type: Analog voltage (0V to Vcc)
- Sensor Count: 8 IR emitter-detector pairs
- Optimal Sensing Distance: 3 mm to 6 mm
- Maximum Sensing Distance: ~25 mm (depending on surface reflectivity)
- Dimensions: 76.2 mm × 12.7 mm × 3.2 mm
- Weight: 3.09 g
Pin Configuration
The QTR-8A has a 10-pin header for easy interfacing. The table below describes each pin:
| Pin | Name | Description |
|---|---|---|
| 1 | Vcc | Power supply input (3.3V to 5V) |
| 2 | GND | Ground connection |
| 3 | OUT1 | Analog output for sensor 1 |
| 4 | OUT2 | Analog output for sensor 2 |
| 5 | OUT3 | Analog output for sensor 3 |
| 6 | OUT4 | Analog output for sensor 4 |
| 7 | OUT5 | Analog output for sensor 5 |
| 8 | OUT6 | Analog output for sensor 6 |
| 9 | OUT7 | Analog output for sensor 7 |
| 10 | OUT8 | Analog output for sensor 8 |
Additional Features
- Emitter Control: The IR emitters can be turned on or off using a separate control pin (not included in the main header).
- Adjustable Sensitivity: The output voltage varies based on the reflectivity of the surface, allowing for fine-tuned sensing.
Usage Instructions
The QTR-8A is straightforward to integrate into a circuit. Follow the steps below to use it effectively:
Connecting the QTR-8A
- Power Supply: Connect the Vcc pin to a 3.3V or 5V power source and the GND pin to ground.
- Analog Outputs: Connect the OUT1 to OUT8 pins to the analog input pins of your microcontroller (e.g., Arduino).
- Emitter Control (Optional): Use the emitter control pin to enable or disable the IR emitters programmatically.
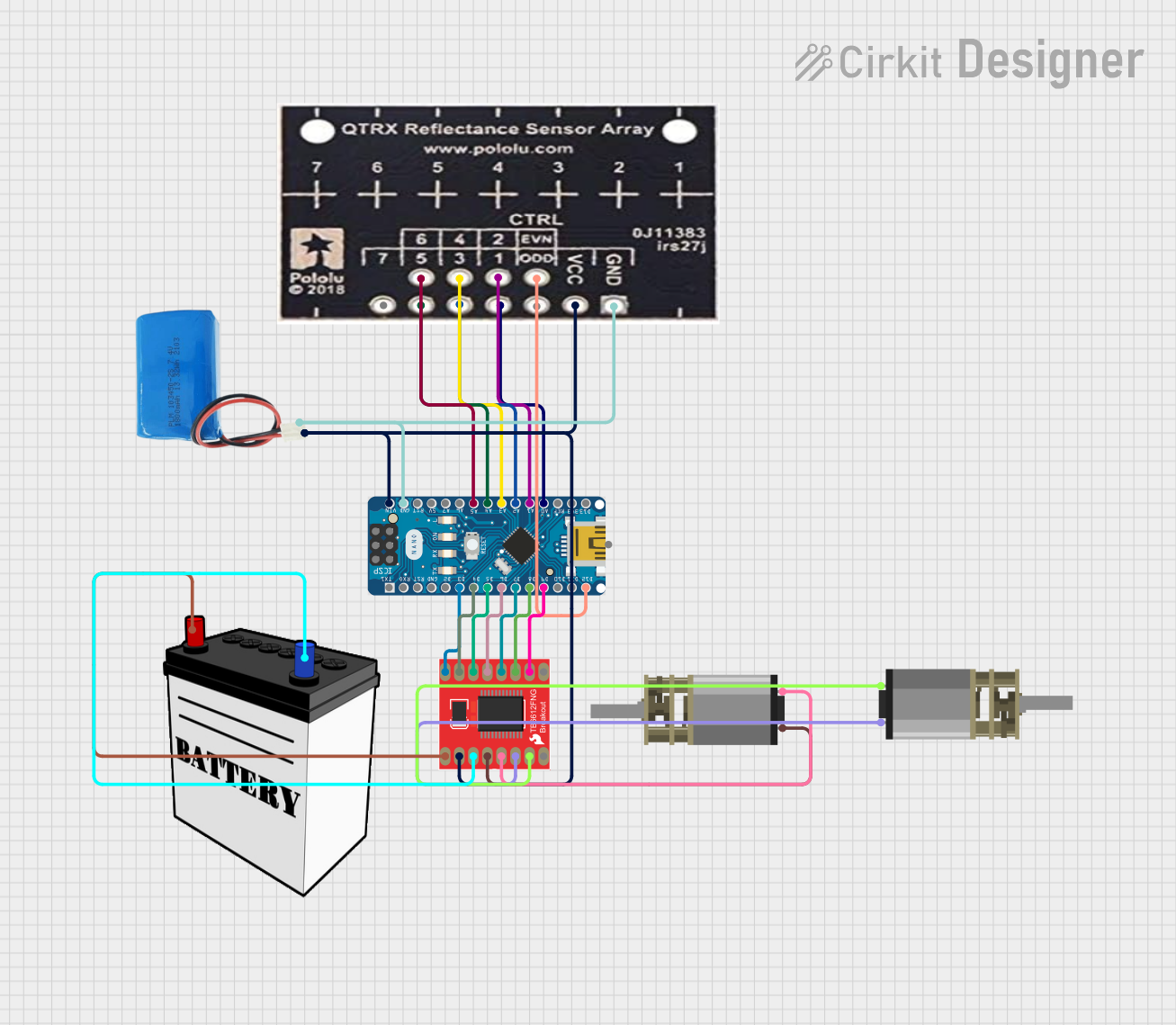
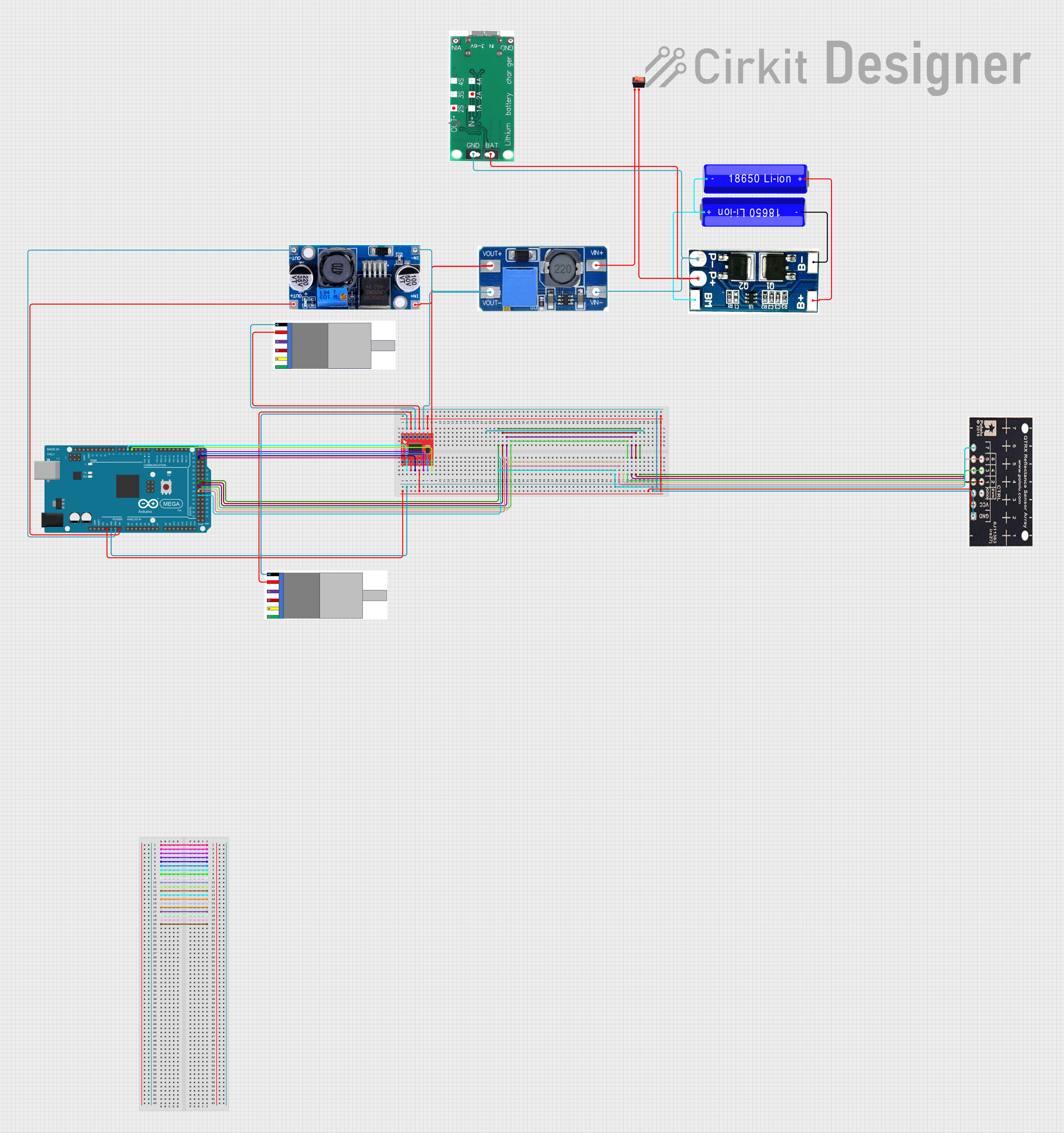
Example Circuit with Arduino UNO
Below is an example of how to connect the QTR-8A to an Arduino UNO:
- Connect the Vcc pin of the QTR-8A to the 5V pin on the Arduino.
- Connect the GND pin of the QTR-8A to the GND pin on the Arduino.
- Connect OUT1 to OUT8 to the Arduino's analog input pins (A0 to A7).
Sample Arduino Code
The following code reads the analog values from the QTR-8A and prints them to the Serial Monitor:
// Define the analog input pins connected to the QTR-8A
const int sensorPins[8] = {A0, A1, A2, A3, A4, A5, A6, A7};
void setup() {
Serial.begin(9600); // Initialize serial communication at 9600 baud
}
void loop() {
for (int i = 0; i < 8; i++) {
int sensorValue = analogRead(sensorPins[i]); // Read analog value from each sensor
Serial.print("Sensor ");
Serial.print(i + 1);
Serial.print(": ");
Serial.print(sensorValue);
Serial.print("\t"); // Add a tab space between sensor readings
}
Serial.println(); // Move to the next line after printing all sensor values
delay(100); // Wait 100 ms before the next reading
}
Important Considerations
- Surface Reflectivity: The sensor's output depends on the reflectivity of the surface. Darker surfaces (e.g., black lines) produce lower output voltages, while lighter surfaces (e.g., white backgrounds) produce higher voltages.
- Emitter Control: To save power, you can disable the IR emitters when the sensor is not in use.
- Distance from Surface: For optimal performance, maintain a distance of 3 mm to 6 mm between the sensor and the surface.
Troubleshooting and FAQs
Common Issues
No Output or Incorrect Readings
- Cause: Improper wiring or insufficient power supply.
- Solution: Double-check all connections and ensure the power supply is within the specified range (3.3V to 5V).
Inconsistent Sensor Readings
- Cause: Uneven surface or incorrect sensor height.
- Solution: Ensure the sensor array is parallel to the surface and within the optimal sensing distance (3 mm to 6 mm).
High Power Consumption
- Cause: All IR emitters are always on.
- Solution: Use the emitter control pin to turn off the emitters when not in use.
Sensors Not Detecting Black Lines
- Cause: Low contrast between the line and the background.
- Solution: Use a surface with higher contrast (e.g., black tape on a white background).
FAQs
Q: Can the QTR-8A be used with a 3.3V microcontroller?
A: Yes, the QTR-8A operates at 3.3V to 5V, making it compatible with 3.3V microcontrollers.
Q: How do I calibrate the sensor for my application?
A: You can calibrate the sensor by recording the maximum and minimum output values during operation and mapping the readings to a desired range.
Q: Can I use fewer than 8 sensors?
A: Yes, you can use only the required number of sensors by connecting the corresponding output pins to your microcontroller and leaving the others unconnected.
Q: What is the maximum sensing distance?
A: The maximum sensing distance is approximately 25 mm, but performance is optimal between 3 mm and 6 mm.
By following this documentation, you can effectively integrate the QTR-8A into your projects and troubleshoot any issues that arise.