How to Use DM332T Stepper Driver: Examples, Pinouts, and Specs

Introduction
The DM332T Stepper Driver by Stepperonline is a high-performance microstepping driver designed for controlling stepper motors with precision. It allows for fine control over motor position and speed, making it ideal for applications requiring smooth and accurate motion. The DM332T supports a wide range of microstepping resolutions and features adjustable current settings, ensuring compatibility with various stepper motors. Additionally, it includes built-in protection mechanisms such as overcurrent and overheating safeguards, enhancing its reliability and durability.
Explore Projects Built with DM332T Stepper Driver


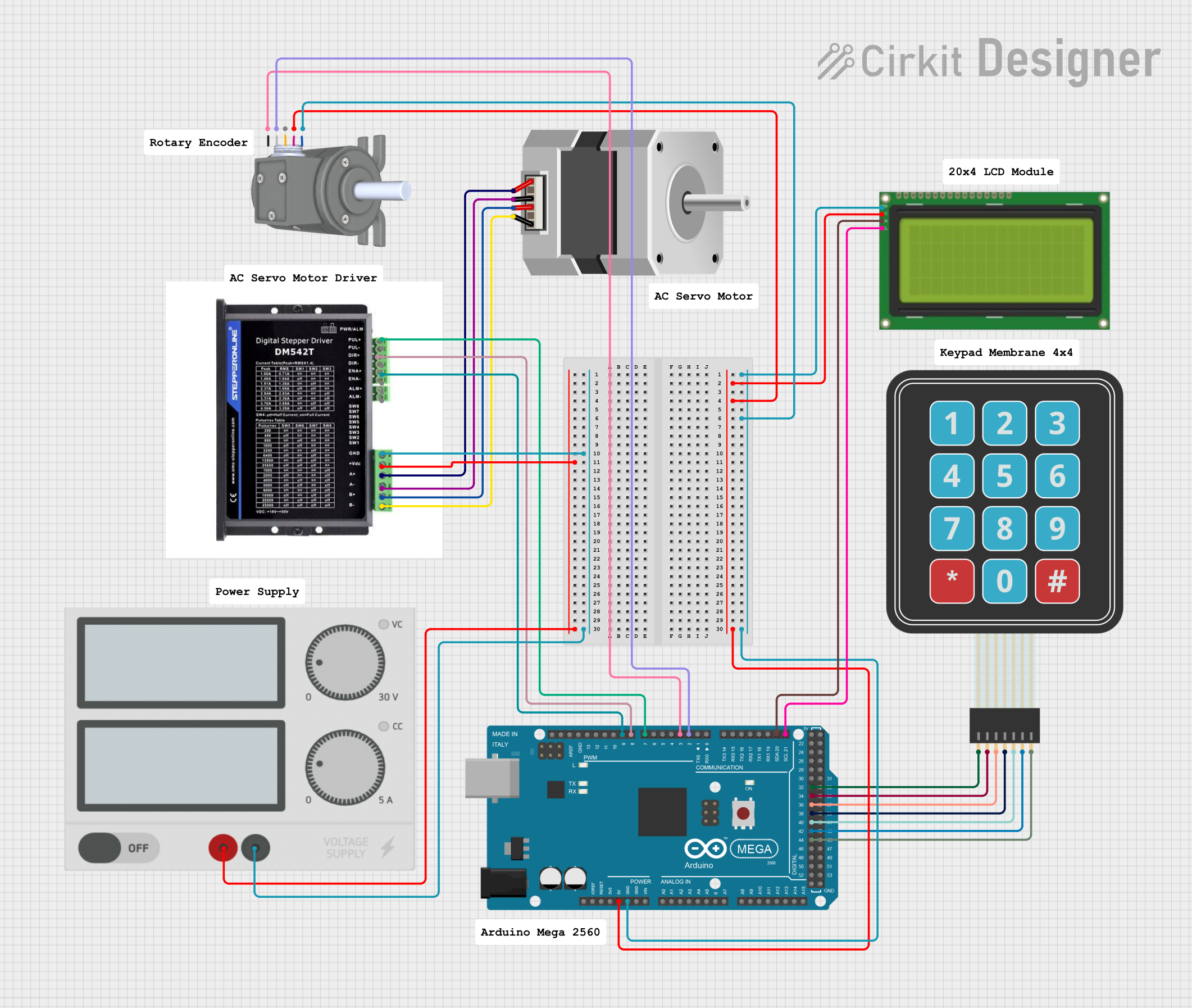
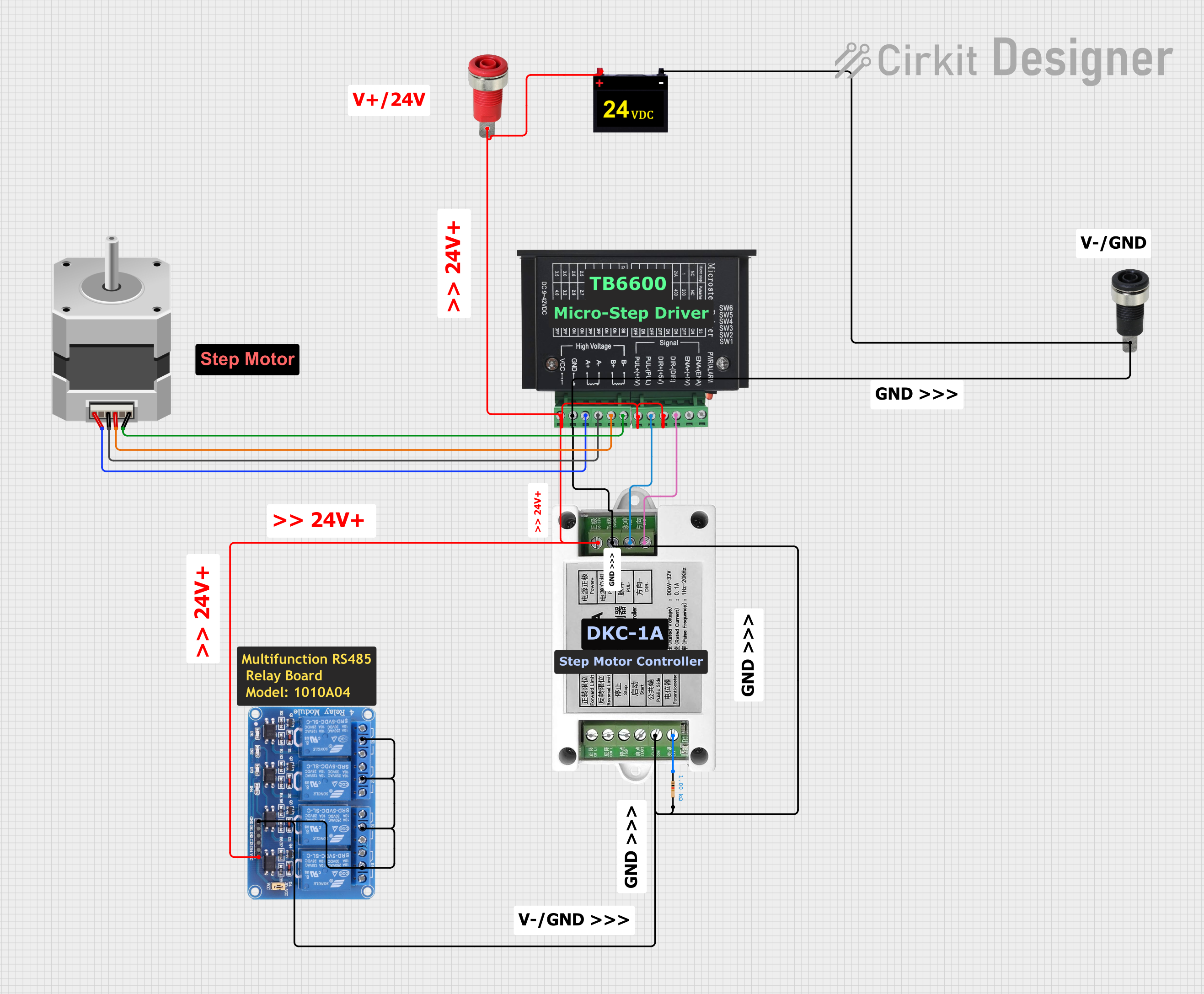
Explore Projects Built with DM332T Stepper Driver
Common Applications and Use Cases
- CNC machines and 3D printers
- Robotics and automation systems
- Precision positioning systems
- Conveyor belts and industrial machinery
- Camera sliders and gimbals
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Manufacturer Part ID | DM332T |
| Input Voltage Range | 12V to 32V DC |
| Output Current Range | 0.3A to 3.2A (adjustable) |
| Microstepping Resolutions | Full step to 1/256 step |
| Control Signal Logic | 3.3V or 5V TTL compatible |
| Pulse Frequency Range | 0 to 200 kHz |
| Protection Features | Overcurrent, overheating, and short-circuit |
| Operating Temperature | 0°C to 50°C |
| Dimensions | 86mm x 55mm x 20mm |
Pin Configuration and Descriptions
The DM332T has a set of input and output terminals for connecting to the power supply, stepper motor, and control signals. Below is the pin configuration:
Input/Output Terminals
| Pin Name | Description |
|---|---|
| V+ | Positive terminal for DC power supply (12V-32V) |
| V- | Negative terminal for DC power supply (GND) |
| A+ | Positive terminal for stepper motor coil A |
| A- | Negative terminal for stepper motor coil A |
| B+ | Positive terminal for stepper motor coil B |
| B- | Negative terminal for stepper motor coil B |
| PUL+ | Positive terminal for pulse signal (step input) |
| PUL- | Negative terminal for pulse signal (step input) |
| DIR+ | Positive terminal for direction signal |
| DIR- | Negative terminal for direction signal |
| ENA+ | Positive terminal for enable signal (optional) |
| ENA- | Negative terminal for enable signal (optional) |
Usage Instructions
How to Use the DM332T in a Circuit
Power Supply Connection:
Connect the V+ and V- terminals to a DC power supply within the range of 12V to 32V. Ensure the power supply can provide sufficient current for the stepper motor.Stepper Motor Connection:
Connect the stepper motor coils to the A+, A-, B+, and B- terminals. Refer to the motor's datasheet to identify the correct coil pairs.Control Signal Connection:
- Connect the PUL+, PUL-, DIR+, and DIR- terminals to the control signals from a microcontroller or pulse generator.
- If using an enable signal, connect ENA+ and ENA- to the appropriate control pins.
Microstepping and Current Settings:
- Use the DIP switches on the driver to configure the microstepping resolution and output current. Refer to the DM332T user manual for the DIP switch settings.
Testing the Setup:
- Power on the system and send pulse and direction signals to the driver.
- Observe the motor's movement to ensure it operates as expected.
Important Considerations and Best Practices
- Current Settings: Set the output current to match the stepper motor's rated current to avoid overheating or damaging the motor.
- Signal Quality: Use shielded cables for control signals to minimize noise and ensure reliable operation.
- Cooling: Ensure adequate ventilation around the driver to prevent overheating during prolonged use.
- Polarity: Double-check the polarity of the power supply and motor connections to avoid damage to the driver.
Example: Connecting the DM332T to an Arduino UNO
Below is an example of how to connect the DM332T to an Arduino UNO and control a stepper motor:
Wiring Diagram
- DM332T PUL+ → Arduino Pin 3
- DM332T PUL- → Arduino GND
- DM332T DIR+ → Arduino Pin 4
- DM332T DIR- → Arduino GND
- DM332T V+ → 24V DC Power Supply Positive
- DM332T V- → 24V DC Power Supply Negative
- Stepper Motor Coils → Connect to A+, A-, B+, B- as per motor datasheet.
Arduino Code
// Define control pins for the DM332T
#define PUL_PIN 3 // Pulse signal pin
#define DIR_PIN 4 // Direction signal pin
void setup() {
pinMode(PUL_PIN, OUTPUT); // Set pulse pin as output
pinMode(DIR_PIN, OUTPUT); // Set direction pin as output
digitalWrite(DIR_PIN, LOW); // Set initial direction (LOW or HIGH)
}
void loop() {
// Generate pulses to move the stepper motor
digitalWrite(PUL_PIN, HIGH); // Set pulse pin HIGH
delayMicroseconds(500); // Wait for 500 microseconds
digitalWrite(PUL_PIN, LOW); // Set pulse pin LOW
delayMicroseconds(500); // Wait for 500 microseconds
}
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Moving:
- Cause: Incorrect wiring or insufficient power supply.
Solution: Verify all connections and ensure the power supply meets the voltage and current requirements.
- Cause: Incorrect wiring or insufficient power supply.
Motor Vibrates but Does Not Rotate:
- Cause: Incorrect microstepping or current settings.
Solution: Check and adjust the DIP switch settings for microstepping and current.
- Cause: Incorrect microstepping or current settings.
Driver Overheating:
- Cause: Insufficient cooling or excessive current setting.
Solution: Ensure proper ventilation and reduce the current setting if necessary.
- Cause: Insufficient cooling or excessive current setting.
Erratic Motor Movement:
- Cause: Noise in control signals or loose connections.
Solution: Use shielded cables and secure all connections.
- Cause: Noise in control signals or loose connections.
FAQs
Q: Can the DM332T drive a NEMA 17 stepper motor?
A: Yes, the DM332T is compatible with NEMA 17 stepper motors, provided the motor's current rating is within the driver's range.Q: What is the maximum pulse frequency supported?
A: The DM332T supports pulse frequencies up to 200 kHz.Q: Is the enable signal mandatory?
A: No, the enable signal is optional. If not used, the driver will remain enabled by default.Q: Can I use a 5V power supply for the DM332T?
A: No, the DM332T requires a DC power supply within the range of 12V to 32V.
By following this documentation, users can effectively integrate the DM332T Stepper Driver into their projects for precise and reliable stepper motor control.