How to Use parts/Adafruit NeoDriver STEMMA QT: Examples, Pinouts, and Specs
Introduction
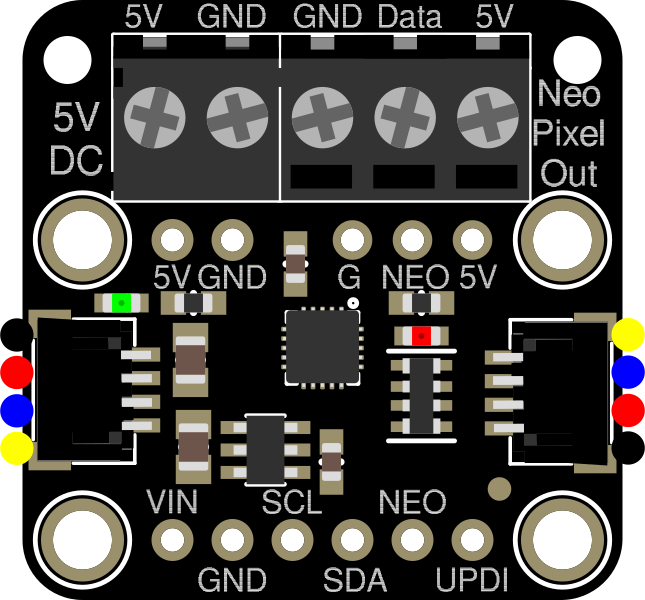
The Adafruit NeoDriver STEMMA QT is a versatile driver board designed for controlling NeoPixel LEDs. It features STEMMA QT connectors, which facilitate easy daisy-chaining and I2C communication. This component is ideal for projects requiring precise control of multiple NeoPixel LEDs, such as decorative lighting, displays, and interactive installations.
Explore Projects Built with parts/Adafruit NeoDriver STEMMA QT
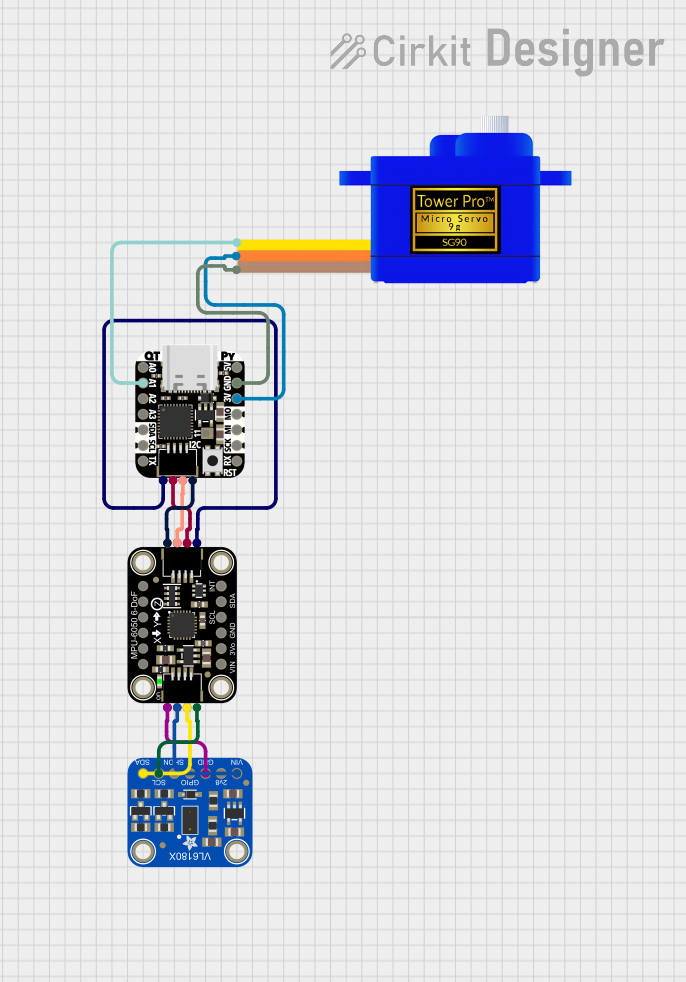
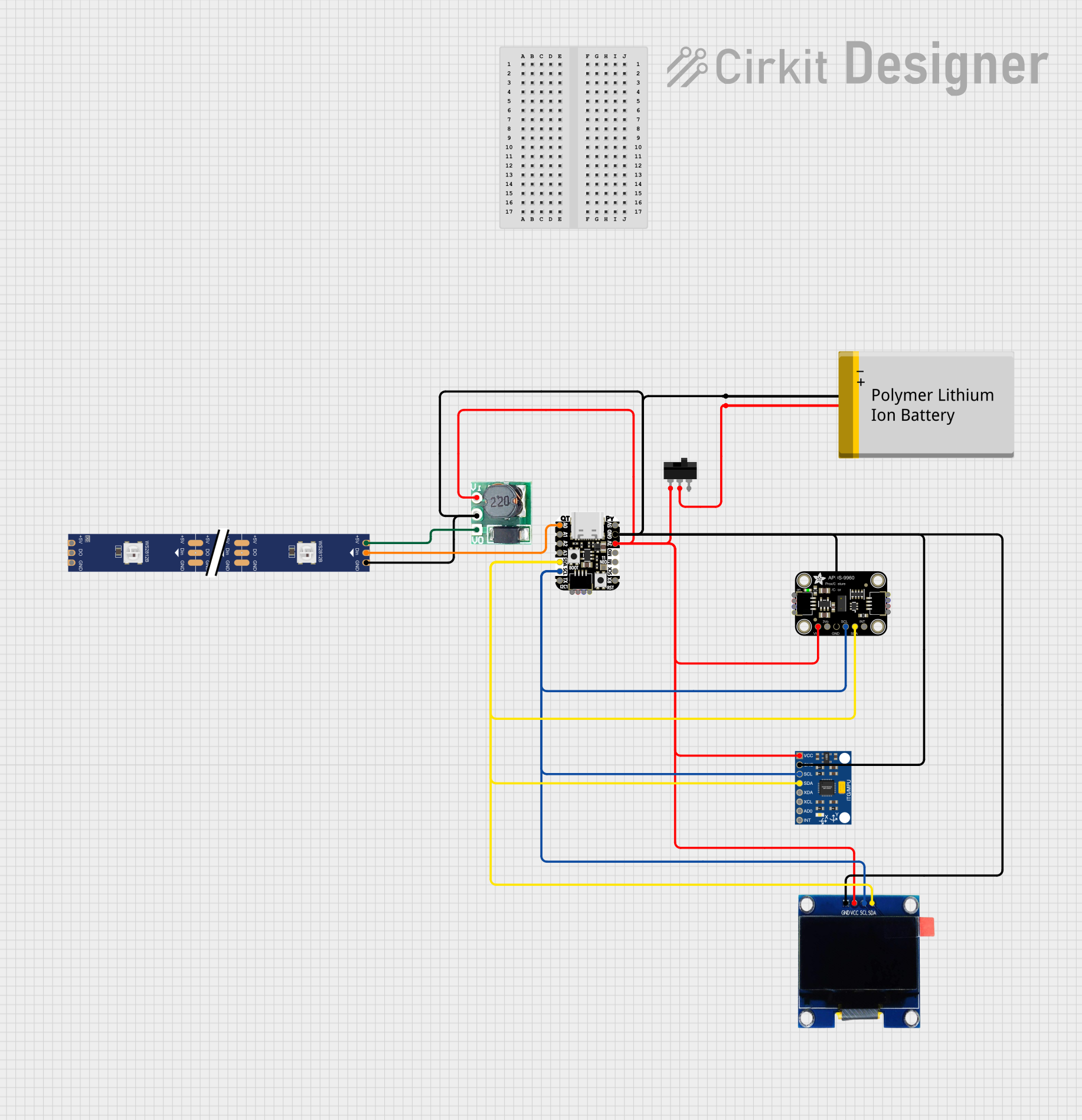
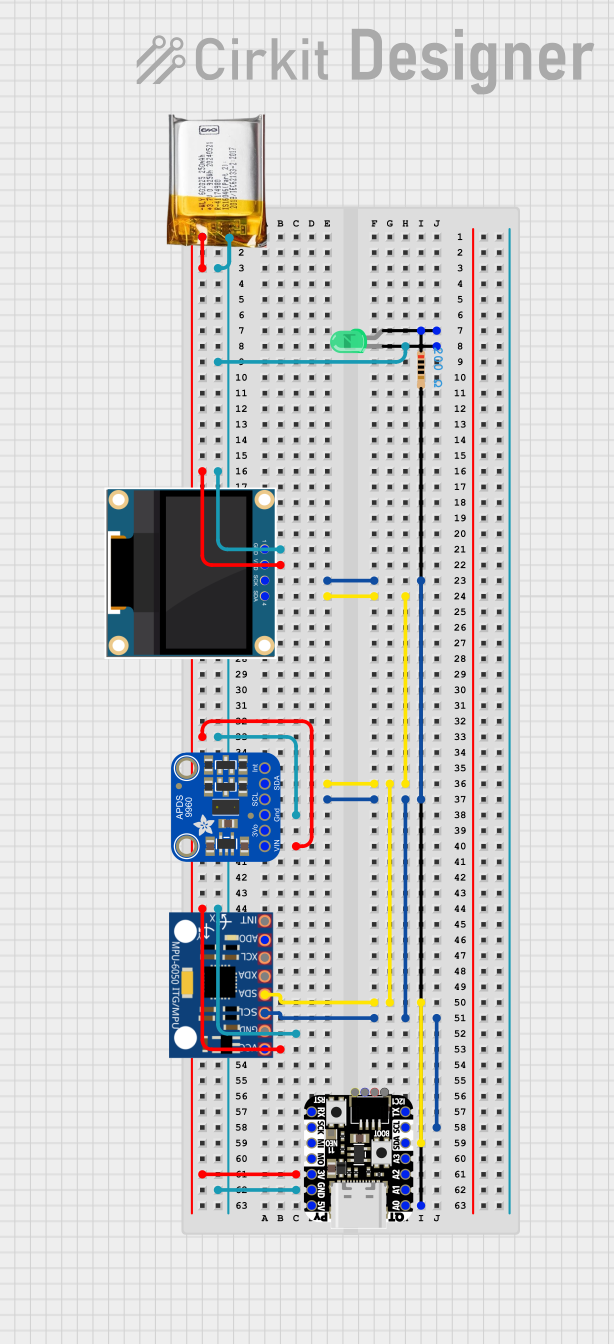
Explore Projects Built with parts/Adafruit NeoDriver STEMMA QT
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Operating Voltage | 3.3V to 5V |
| Communication | I2C |
| I2C Address | 0x40 (default) |
| Current Consumption | Up to 1A (depending on load) |
| Dimensions | 25mm x 25mm x 4mm |
Pin Configuration and Descriptions
| Pin Name | Description |
|---|---|
| VIN | Power input (3.3V to 5V) |
| GND | Ground |
| SCL | I2C clock line |
| SDA | I2C data line |
| STEMMA QT | Connectors for daisy-chaining and I2C communication |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect the VIN pin to a 3.3V or 5V power source and the GND pin to the ground.
- I2C Communication: Connect the SCL and SDA pins to the corresponding pins on your microcontroller (e.g., Arduino UNO).
- NeoPixel Connection: Connect the NeoPixel LED strip to the output pins of the NeoDriver.
- Daisy-Chaining: Use the STEMMA QT connectors to daisy-chain multiple NeoDriver boards if needed.
Important Considerations and Best Practices
- Power Supply: Ensure that your power supply can handle the current requirements of the NeoPixel LEDs.
- I2C Address: The default I2C address is 0x40. If you are using multiple NeoDriver boards, ensure each has a unique address.
- Heat Management: High current loads can generate heat. Ensure adequate ventilation or heat dissipation.
Example Code for Arduino UNO
#include <Wire.h>
#include <Adafruit_NeoPixel.h>
#define I2C_ADDRESS 0x40 // Default I2C address for NeoDriver
#define PIN 6 // Pin connected to NeoPixel strip
Adafruit_NeoPixel strip = Adafruit_NeoPixel(30, PIN, NEO_GRB + NEO_KHZ800);
void setup() {
Wire.begin(); // Initialize I2C communication
strip.begin(); // Initialize NeoPixel strip
strip.show(); // Initialize all pixels to 'off'
}
void loop() {
for (int i = 0; i < strip.numPixels(); i++) {
strip.setPixelColor(i, strip.Color(255, 0, 0)); // Set pixel to red
strip.show(); // Update strip to show new color
delay(50); // Short delay to create animation effect
}
}
Troubleshooting and FAQs
Common Issues Users Might Face
No Response from NeoPixel LEDs:
- Solution: Check the power connections and ensure the NeoPixel strip is properly connected to the NeoDriver.
I2C Communication Failure:
- Solution: Verify the I2C connections (SCL and SDA) and ensure the correct I2C address is used in the code.
Overheating:
- Solution: Ensure the power supply can handle the current load and provide adequate ventilation.
FAQs
Q1: Can I use a different I2C address for multiple NeoDriver boards?
- A1: Yes, you can change the I2C address by modifying the address jumpers on the board.
Q2: What is the maximum number of NeoPixel LEDs I can control with one NeoDriver?
- A2: The maximum number depends on the power supply and current requirements. Ensure your power supply can handle the total current draw.
Q3: Can I use the NeoDriver with microcontrollers other than Arduino?
- A3: Yes, the NeoDriver can be used with any microcontroller that supports I2C communication.
This documentation provides a comprehensive guide to using the Adafruit NeoDriver STEMMA QT. Whether you are a beginner or an experienced user, following these instructions will help you effectively integrate this component into your projects.