How to Use Adafruit VL6180X Time of Flight Distance Sensor: Examples, Pinouts, and Specs
Introduction
The Adafruit VL6180X Time of Flight Distance Sensor is a state-of-the-art sensor that utilizes time-of-flight (ToF) measurements of infrared light to determine the distance between the sensor and a target object. This technology allows for precise and accurate distance measurements, making it an ideal choice for a wide range of applications such as robotics, user interface controls, and obstacle detection systems.
Explore Projects Built with Adafruit VL6180X Time of Flight Distance Sensor
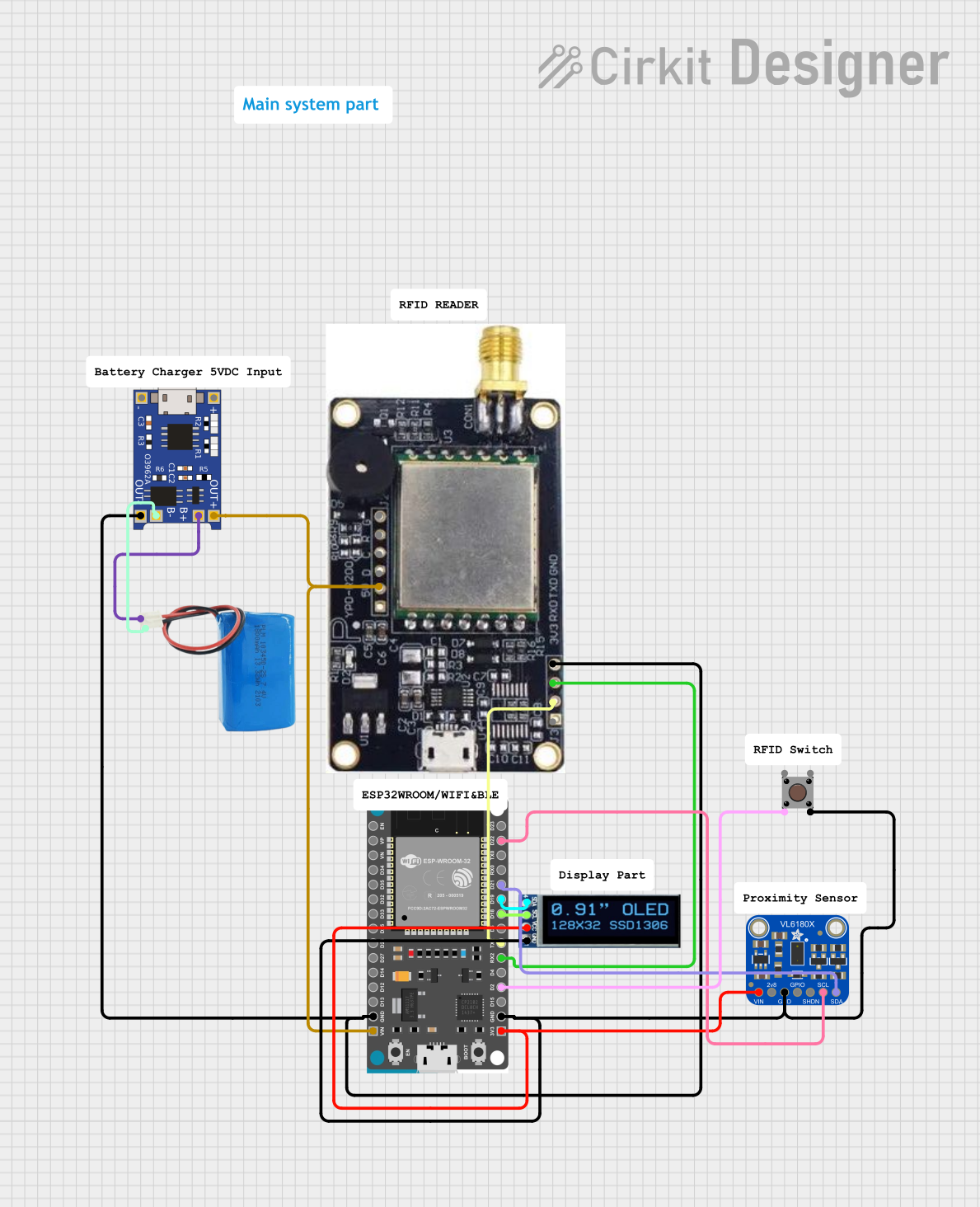
Explore Projects Built with Adafruit VL6180X Time of Flight Distance Sensor
Common Applications and Use Cases
- Robotics: obstacle avoidance, navigation
- User interfaces: gesture recognition, touchless control
- Object detection: proximity sensing, level control
- Drones: altitude sensing, collision avoidance
Technical Specifications
Key Technical Details
- Operating Voltage: 2.6V to 3.5V
- Current Consumption: 10mA (typical)
- Range: Up to 200mm (actual range depends on object reflectivity and other environmental conditions)
- Resolution: 1mm
- Interface: I2C
- Wavelength: 850nm (infrared light)
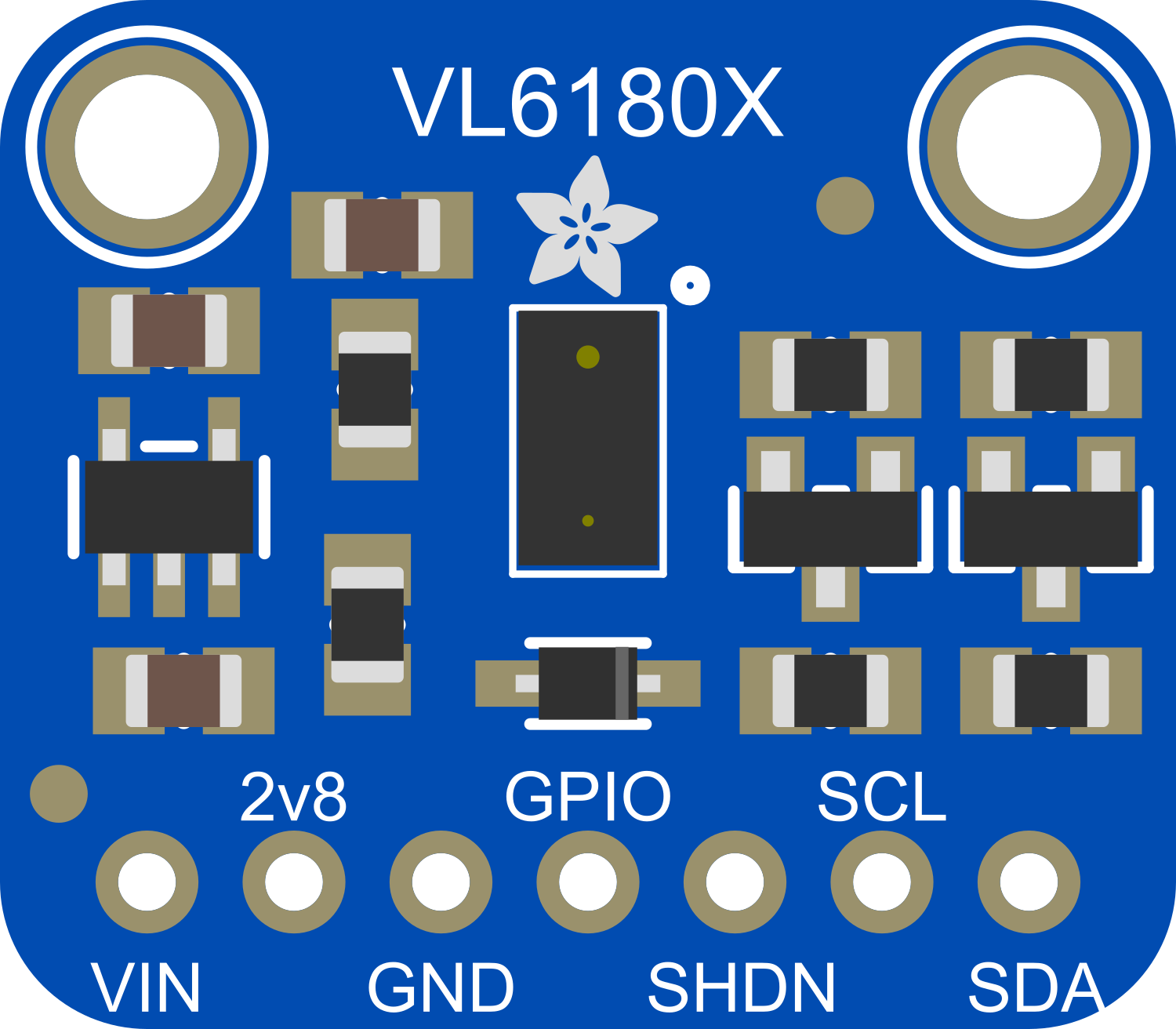
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VIN | Power supply (2.6V to 3.5V) |
| 2 | GND | Ground connection |
| 3 | SCL | I2C clock line |
| 4 | SDA | I2C data line |
| 5 | GPIO1 | General purpose I/O (optional use) |
| 6 | GPIO0 | General purpose I/O (optional use) |
Usage Instructions
How to Use the Component in a Circuit
- Connect the VIN pin to a 2.6V to 3.5V power supply.
- Connect the GND pin to the ground of the power supply.
- Connect the SCL and SDA pins to the I2C clock and data lines, respectively.
- If necessary, configure the GPIO pins for additional functionality.
Important Considerations and Best Practices
- Ensure that the power supply voltage does not exceed the maximum rating of 3.5V.
- Use pull-up resistors on the I2C lines if they are not already present on the microcontroller board.
- Avoid placing objects with reflective surfaces too close to the sensor, as this may affect accuracy.
- Keep the sensor away from direct sunlight and other strong infrared sources to prevent interference.
Example Code for Arduino UNO
#include <Wire.h>
#include <Adafruit_VL6180X.h>
Adafruit_VL6180X vl = Adafruit_VL6180X();
void setup() {
Serial.begin(9600);
// Wait for serial port to connect (necessary for Leonardo only)
while (!Serial) {
delay(1);
}
Serial.println("Adafruit VL6180X test");
if (!vl.begin()) {
Serial.println("Failed to find sensor");
while (1);
}
Serial.println("Sensor found!");
}
void loop() {
float lux = vl.readLux(VL6180X_ALS_GAIN_5);
Serial.print("Lux: "); Serial.println(lux);
uint8_t range = vl.readRange();
uint8_t status = vl.readRangeStatus();
if (status == VL6180X_ERROR_NONE) {
Serial.print("Range: "); Serial.println(range);
}
// Some error occurred, print it out!
if ((status >= VL6180X_ERROR_SYSERR_1) && (status <= VL6180X_ERROR_SYSERR_5)) {
Serial.println("System error");
}
else if (status == VL6180X_ERROR_ECEFAIL) {
Serial.println("ECE failure");
}
else if (status == VL6180X_ERROR_NOCONVERGE) {
Serial.println("No convergence");
}
else if (status == VL6180X_ERROR_RANGEIGNORE) {
Serial.println("Ignoring range");
}
else if (status == VL6180X_ERROR_SNR) {
Serial.println("Signal/Noise error");
}
else if (status == VL6180X_ERROR_RAWUFLOW) {
Serial.println("Raw reading underflow");
}
else if (status == VL6180X_ERROR_RAWOFLOW) {
Serial.println("Raw reading overflow");
}
else if (status == VL6180X_ERROR_RANGEUFLOW) {
Serial.println("Range underflow");
}
else if (status == VL6180X_ERROR_RANGEOFLOW) {
Serial.println("Range overflow");
}
delay(50);
}
Troubleshooting and FAQs
Common Issues Users Might Face
- Inaccurate Readings: Ensure there are no reflective surfaces too close to the sensor and that the sensor is not exposed to direct sunlight or strong infrared sources.
- No Response from Sensor: Check the wiring, especially the I2C connections, and ensure that the correct voltage is supplied.
- Intermittent Functionality: Ensure that the I2C pull-up resistors are correctly sized and that there is no power supply instability.
Solutions and Tips for Troubleshooting
- Double-check the wiring against the pin configuration table.
- Use a logic analyzer or oscilloscope to check the I2C communication.
- Make sure the sensor is not mounted near heat sources or in direct sunlight.
- Consult the sensor's datasheet for more detailed troubleshooting steps.
FAQs
Q: What is the maximum range of the sensor? A: The maximum range is up to 200mm, but this can vary based on object reflectivity and environmental conditions.
Q: Can the sensor be used outdoors? A: The sensor can be used outdoors but should be shielded from direct sunlight and extreme weather conditions for accurate measurements.
Q: Is the sensor compatible with 5V systems? A: The sensor operates between 2.6V and 3.5V. A level shifter is required for use with 5V systems.
Q: How can I extend the range of the sensor? A: The range cannot be extended beyond its maximum capability; however, ensuring a clear path and minimal interference can help achieve the best possible range within its limits.