How to Use Raspberry Pi Pico Board RP2040: Examples, Pinouts, and Specs
Introduction
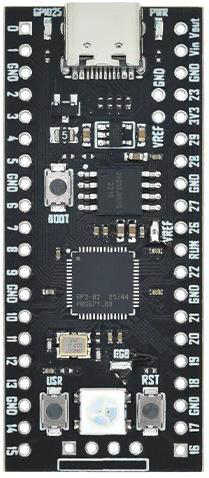
The Raspberry Pi Pico Board RP2040 is a compact and versatile microcontroller board developed by Raspberry. It is powered by the RP2040 chip, a dual-core ARM Cortex-M0+ processor, and is designed for a wide range of applications, from simple hobbyist projects to complex embedded systems. The board features 26 GPIO pins, USB connectivity, and supports programming in C, C++, MicroPython, and CircuitPython, making it an excellent choice for both beginners and experienced developers.
Explore Projects Built with Raspberry Pi Pico Board RP2040
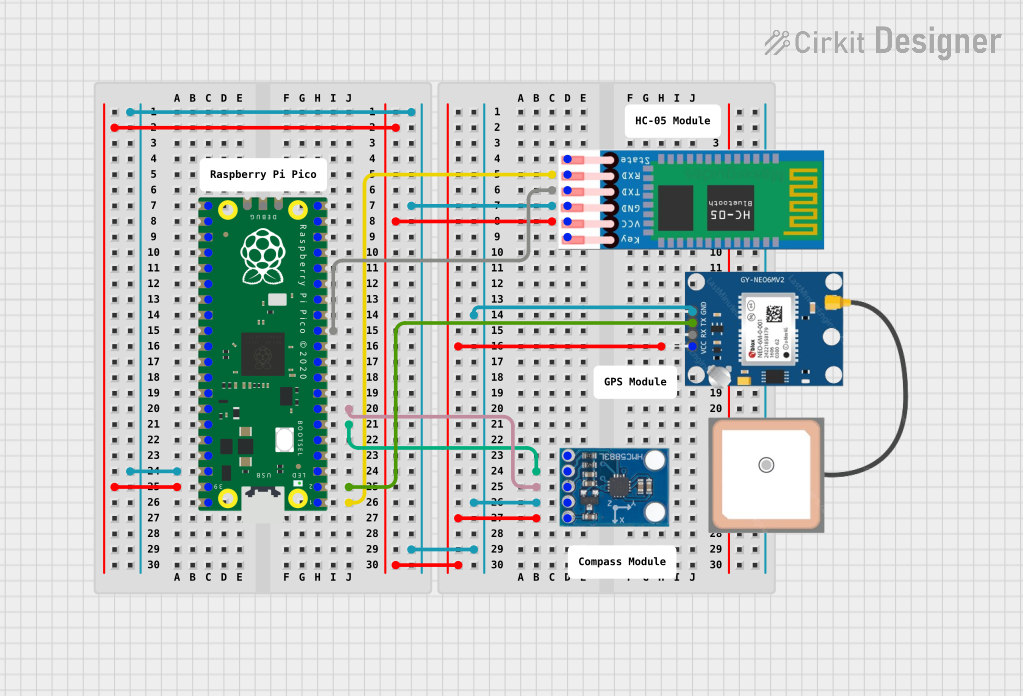
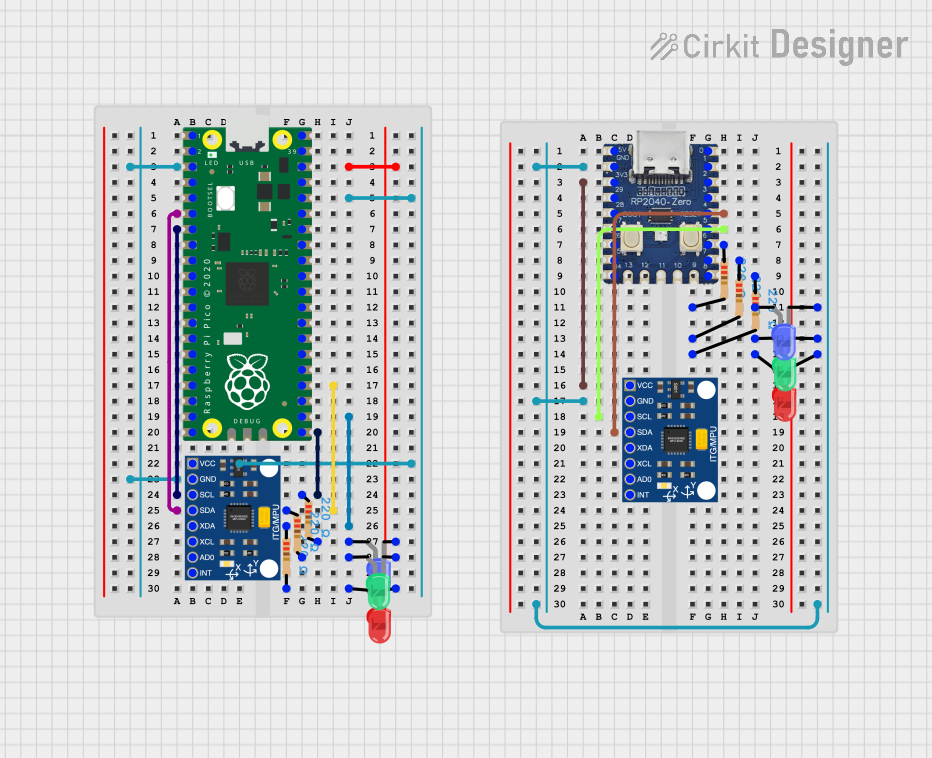
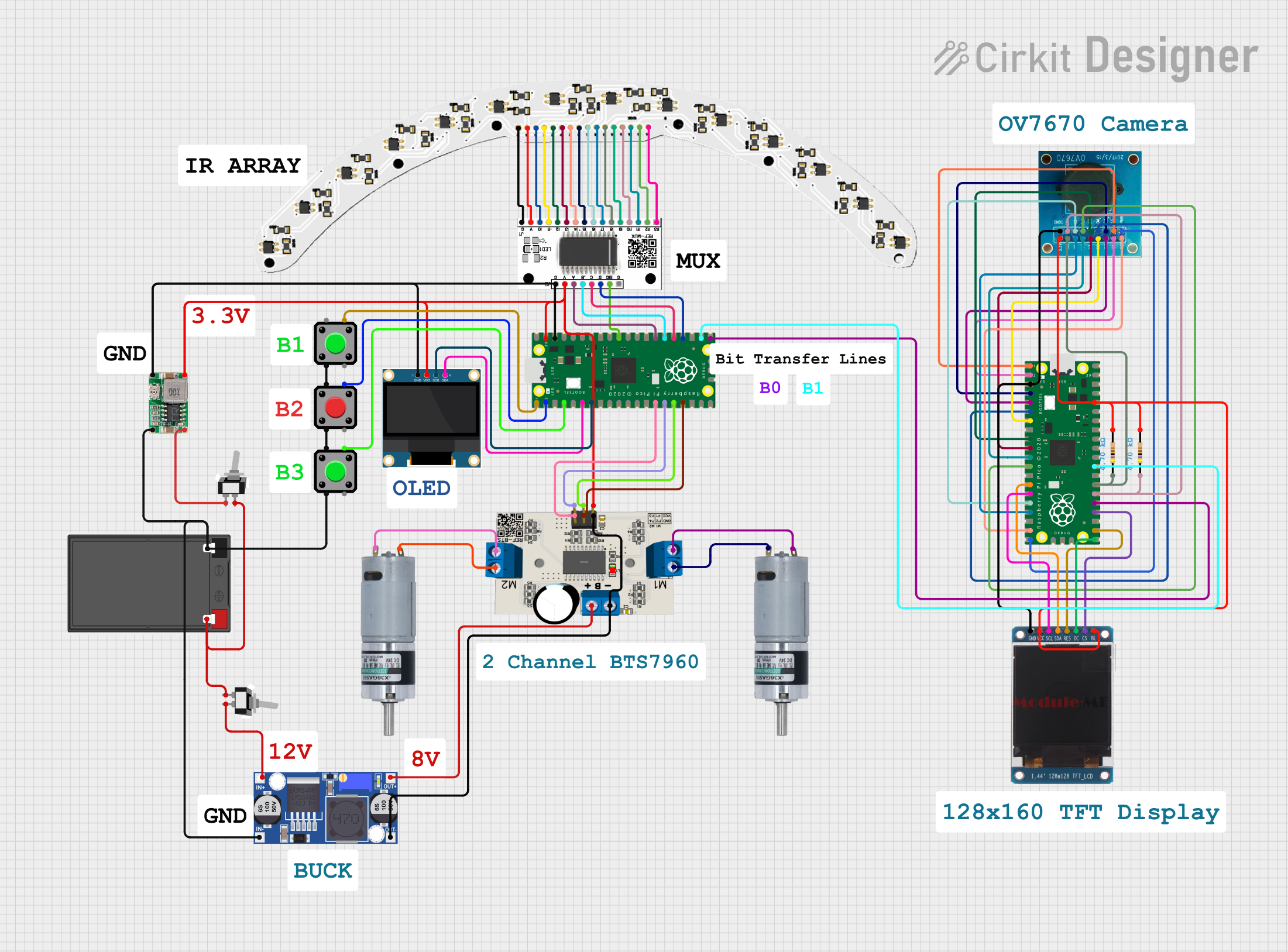
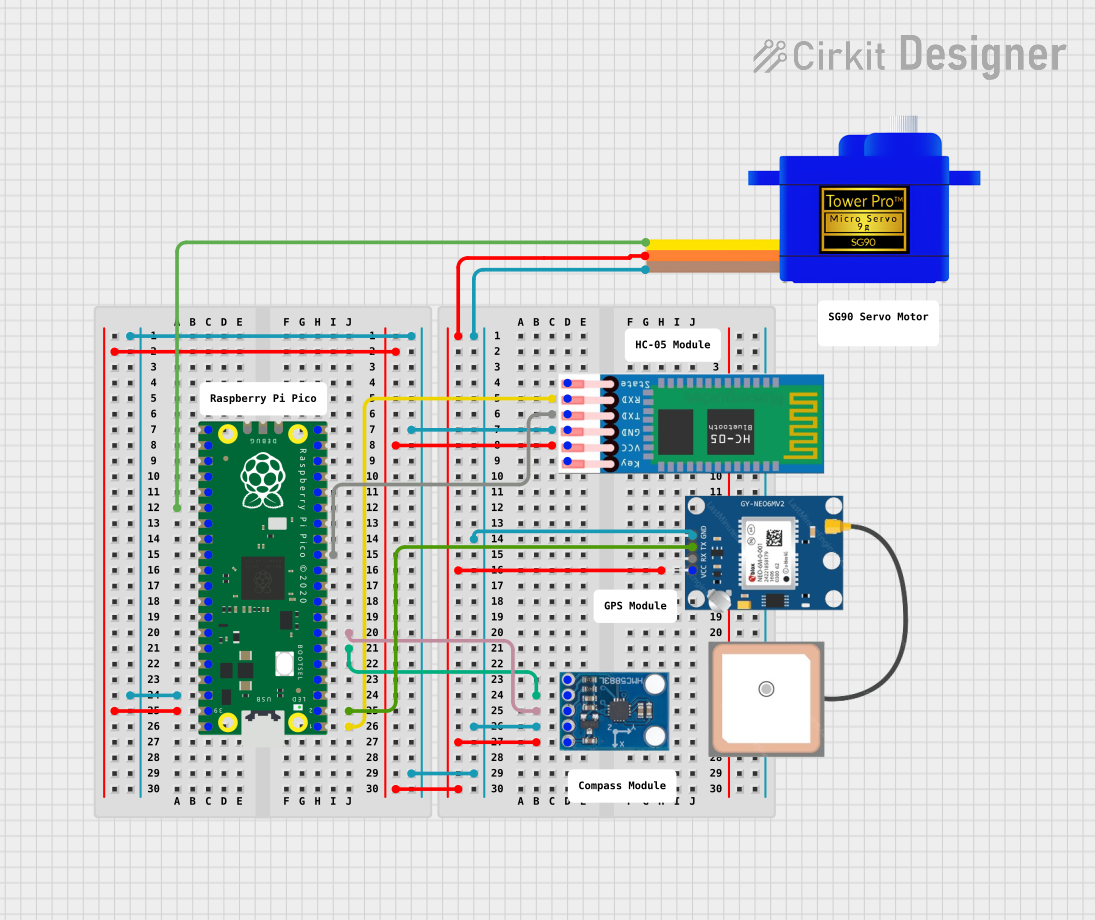
Explore Projects Built with Raspberry Pi Pico Board RP2040
Common Applications and Use Cases
- IoT (Internet of Things) devices and automation
- Robotics and motor control
- Sensor interfacing and data logging
- Educational projects and prototyping
- Wearable electronics
- Home automation systems
Technical Specifications
Key Technical Details
- Processor: Dual-core ARM Cortex-M0+ @ 133 MHz
- Memory: 264 KB SRAM, 2 MB onboard QSPI flash
- GPIO Pins: 26 multi-function pins (3.3V logic level)
- Interfaces: I2C, SPI, UART, PWM, ADC
- USB: Micro-USB port for power, programming, and communication
- Operating Voltage: 3.3V (GPIO), 5V (via USB or VSYS pin)
- Power Supply: 1.8V to 5.5V (via VSYS pin)
- Dimensions: 51mm x 21mm
- Temperature Range: -20°C to +85°C
Pin Configuration and Descriptions
The Raspberry Pi Pico Board RP2040 has 40 pins, including power, ground, and GPIO pins. Below is a summary of the pin configuration:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | GND | Ground |
| 2 | VSYS | Power input (1.8V to 5.5V) |
| 3 | GND | Ground |
| 4 | 3V3(OUT) | 3.3V output |
| 5 | GP0 | GPIO 0, supports I2C0 SDA, SPI0 RX |
| 6 | GP1 | GPIO 1, supports I2C0 SCL, SPI0 CSn |
| 7 | GND | Ground |
| 8 | GP2 | GPIO 2, supports I2C1 SDA, SPI0 SCK |
| 9 | GP3 | GPIO 3, supports I2C1 SCL, SPI0 TX |
| 10 | GND | Ground |
| ... | ... | ... (Refer to the official datasheet for full details) |
For a complete pinout diagram, refer to the official Raspberry Pi Pico documentation.
Usage Instructions
How to Use the Raspberry Pi Pico Board RP2040 in a Circuit
Powering the Board:
- Connect the board to a computer or USB power source using a Micro-USB cable.
- Alternatively, supply power via the VSYS pin (1.8V to 5.5V).
Programming the Board:
- Install the required software (e.g., Thonny IDE for MicroPython or the Arduino IDE for C/C++).
- Put the board into bootloader mode by holding the BOOTSEL button while connecting it to your computer via USB.
- Drag and drop the firmware file (e.g., MicroPython UF2) onto the mounted drive.
Connecting Peripherals:
- Use the GPIO pins to connect sensors, actuators, or other peripherals.
- Ensure that all connected devices operate at 3.3V logic levels to avoid damaging the board.
Example Circuit:
- Connect an LED to GPIO 15 with a 330-ohm resistor in series.
- Use the following MicroPython code to blink the LED.
Example MicroPython Code
Import the Pin and Timer classes from the machine module
from machine import Pin, Timer
Configure GPIO 15 as an output pin
led = Pin(15, Pin.OUT)
Define a function to toggle the LED state
def toggle_led(timer): led.toggle() # Toggle the LED on/off
Create a timer to call the toggle_led function every 500ms
timer = Timer() timer.init(freq=2, mode=Timer.PERIODIC, callback=toggle_led)
The LED will now blink at a frequency of 2 Hz (500ms on/off)
Important Considerations and Best Practices
- Always check the voltage and current ratings of connected peripherals to avoid damage.
- Use level shifters if interfacing with 5V devices.
- Avoid shorting GPIO pins or connecting them directly to power or ground.
- Use decoupling capacitors for stable power supply in noisy environments.
Troubleshooting and FAQs
Common Issues and Solutions
The board is not detected by the computer:
- Ensure the Micro-USB cable supports data transfer (not just charging).
- Check if the board is in bootloader mode (hold BOOTSEL while connecting).
GPIO pins are not working as expected:
- Verify the pin configuration in your code.
- Check for loose or incorrect connections in the circuit.
The board overheats or shuts down:
- Ensure the power supply voltage is within the acceptable range (1.8V to 5.5V).
- Avoid drawing excessive current from the GPIO pins.
FAQs
Can I power the board with a battery?
Yes, you can power the board using a battery connected to the VSYS pin, as long as the voltage is between 1.8V and 5.5V.What programming languages are supported?
The Raspberry Pi Pico supports C, C++, MicroPython, and CircuitPython.How do I reset the board?
Disconnect and reconnect the power, or press the reset button if available.
For more detailed information, refer to the official Raspberry Pi Pico documentation.