How to Use SparkFun AutoDriver - Stepper Motor Driver (v10): Examples, Pinouts, and Specs
Introduction
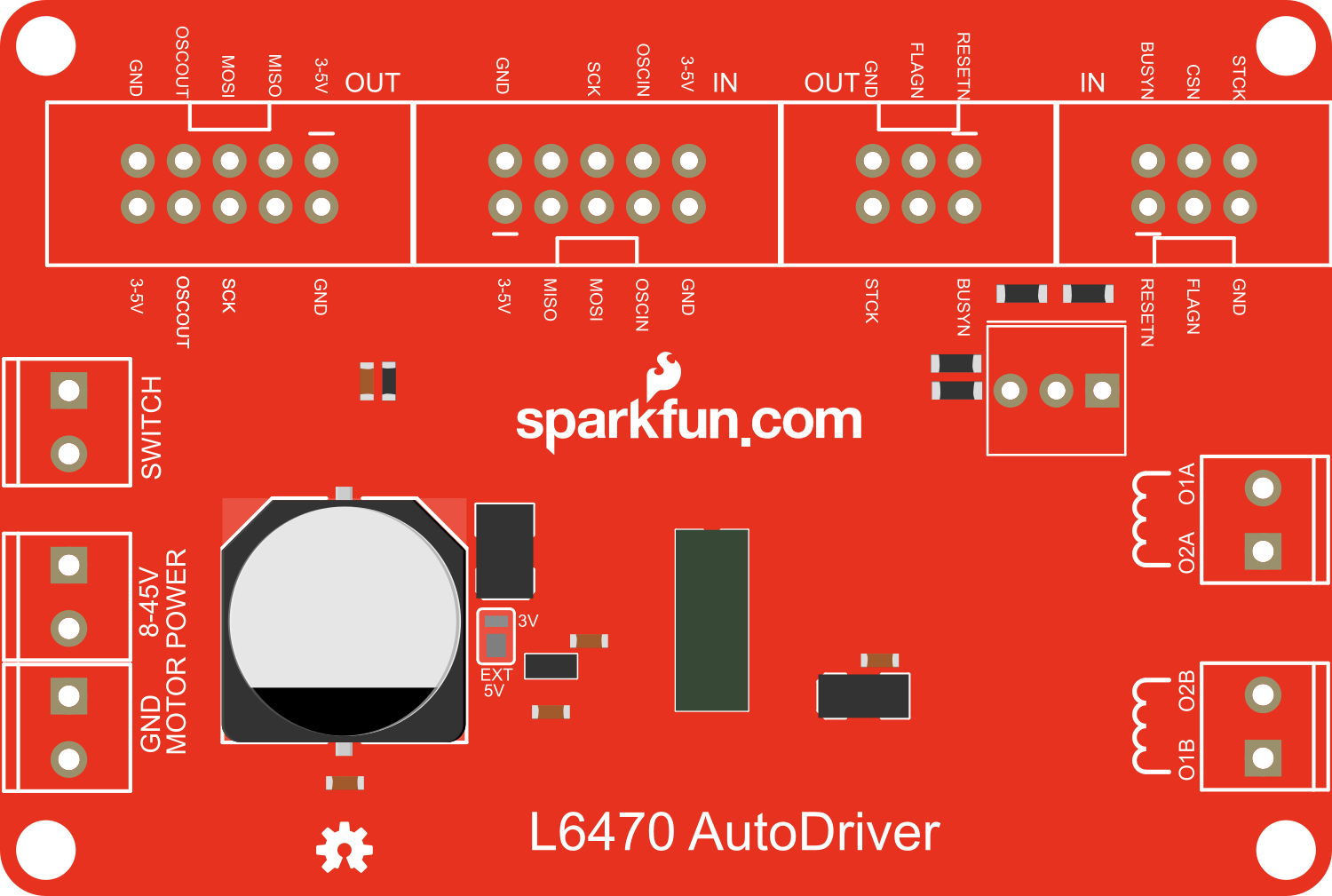
The SparkFun AutoDriver is a sophisticated stepper motor driver that offers a versatile solution for driving bipolar stepper motors in various applications. It is based on the STMicroelectronics L6470 chip, which provides advanced features such as adjustable current control, microstepping, and built-in overcurrent protection. This driver is suitable for projects requiring precise motor control, such as 3D printers, CNC machines, and robotics.
Explore Projects Built with SparkFun AutoDriver - Stepper Motor Driver (v10)
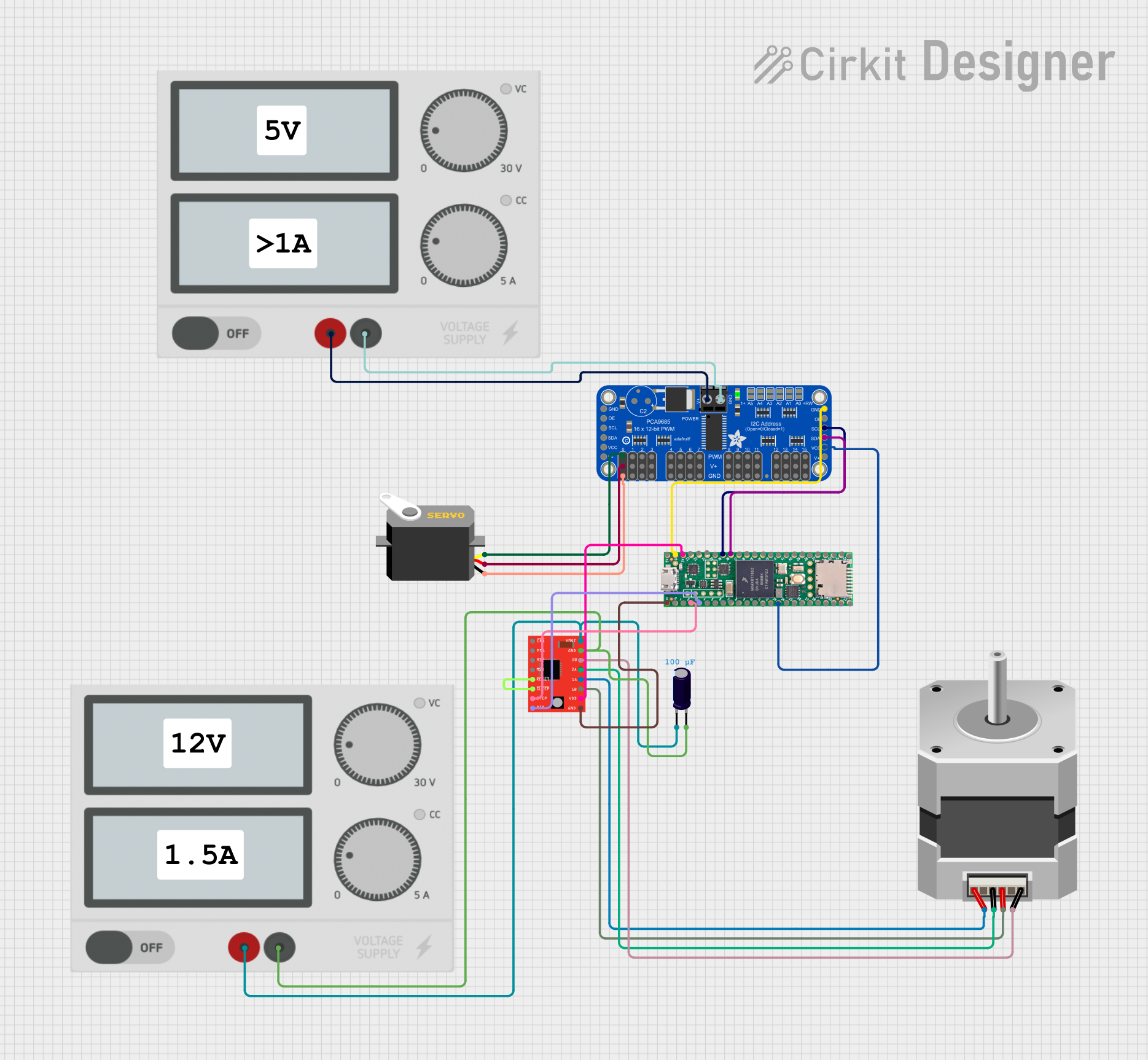
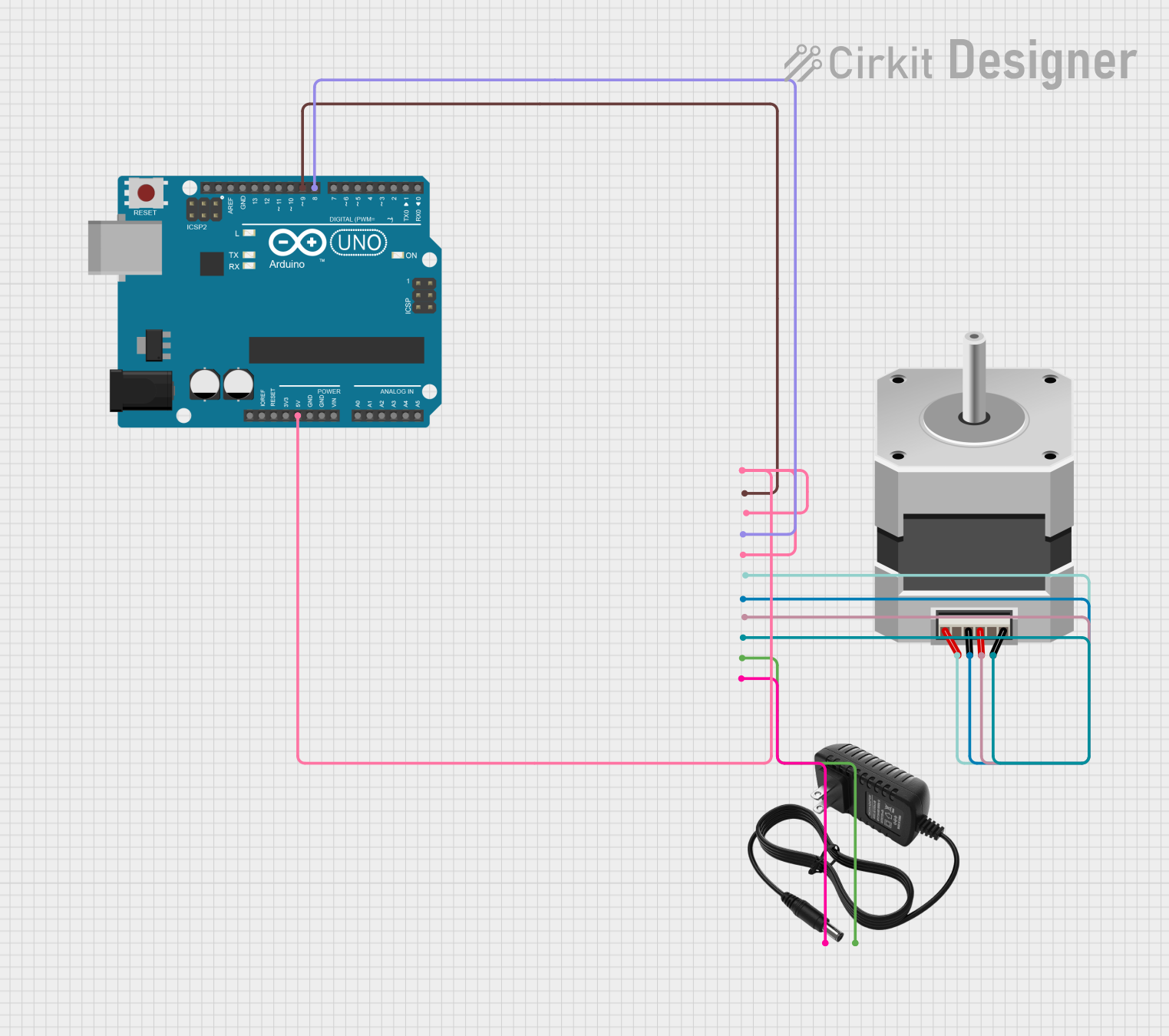
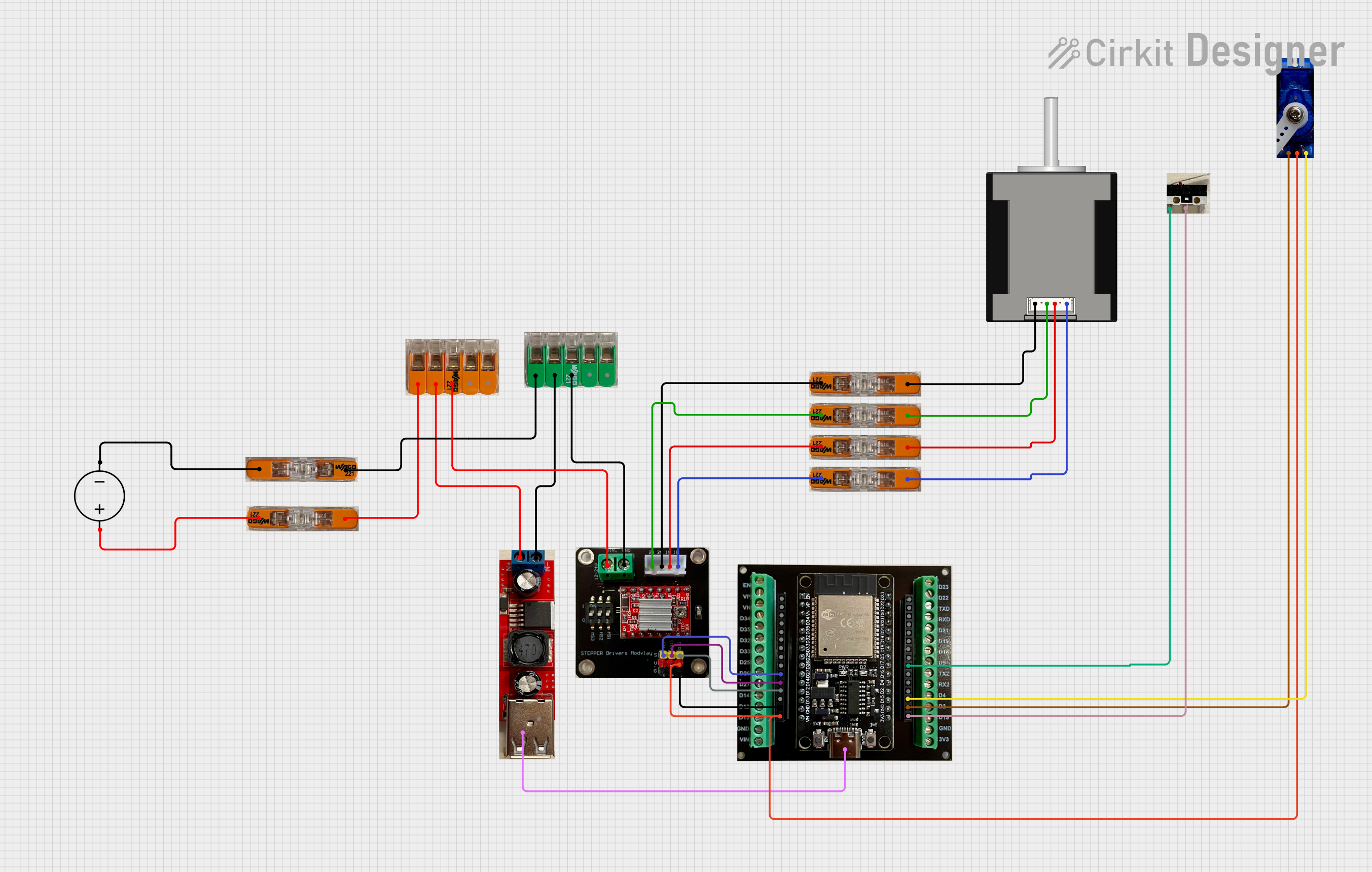
Explore Projects Built with SparkFun AutoDriver - Stepper Motor Driver (v10)
Common Applications and Use Cases
- 3D Printing
- CNC Machines
- Robotics
- Precision Positioning Systems
- Automated Equipment
Technical Specifications
Key Technical Details
- Motor Type: Bipolar Stepper
- Maximum Current per Phase: 1.5A
- Voltage Range: 8V to 45V
- Microstepping: Up to 1/128
- Communication: SPI for configuration and control, Step/Direction interface
- Built-in Features: Overcurrent protection, thermal shutdown, under-voltage lockout
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VMOT | Motor power supply (8V to 45V) |
| 2 | GND | Ground connection |
| 3 | B1 | Motor coil B connection 1 |
| 4 | B2 | Motor coil B connection 2 |
| 5 | A1 | Motor coil A connection 1 |
| 6 | A2 | Motor coil A connection 2 |
| 7 | VDD | Logic power supply (3.3V or 5V) |
| 8 | STBY | Standby pin (active low) |
| 9 | FLAG | Fault flag output |
| 10 | BUSY | Busy pin (active low) |
| 11 | SCK | SPI clock input |
| 12 | SDI | SPI data input |
| 13 | SDO | SPI data output |
| 14 | CSN | SPI chip select (active low) |
| 15 | STCK | External clock input (optional) |
| 16 | STEP | Step input |
| 17 | DIR | Direction input |
| 18 | RESET | Reset pin (active low) |
Usage Instructions
How to Use the Component in a Circuit
Power Connections:
- Connect the motor power supply to the VMOT and GND pins.
- Connect the logic power supply to the VDD and GND pins.
Motor Connections:
- Connect the bipolar stepper motor coils to the A1, A2, B1, and B2 pins.
Control Connections:
- For step/direction control, connect the STEP and DIR pins to the controlling microcontroller.
- For SPI communication, connect the SCK, SDI, SDO, and CSN pins to the corresponding SPI pins on the microcontroller.
Configuration:
- Use the SPI interface to configure the AutoDriver settings such as current limit, step mode, and other parameters.
Operation:
- Send step pulses to the STEP pin to move the motor. Change the logic level of the DIR pin to control the direction.
Important Considerations and Best Practices
- Ensure that the power supply voltage and current ratings are within the specifications of the AutoDriver.
- Use a decoupling capacitor close to the VMOT and VDD pins to minimize voltage spikes.
- Configure the current limit to match the stepper motor's specifications to prevent damage.
- Avoid disconnecting the motor while the driver is powered to prevent damage to the driver.
- Use proper heat sinking if operating the driver at high currents for extended periods.
Troubleshooting and FAQs
Common Issues
- Motor not moving: Check power supply connections, motor connections, and SPI configuration.
- Overheating: Ensure proper current settings and heat sinking.
- Noise or erratic movement: Adjust the current limit and check for proper microstepping configuration.
Solutions and Tips for Troubleshooting
- Verify all connections and solder joints.
- Use the FLAG pin to diagnose fault conditions.
- Ensure that the SPI communication is correctly established with the microcontroller.
- Check the thermal and overcurrent protection settings.
FAQs
Q: Can I drive two motors simultaneously with one AutoDriver?
- A: No, the AutoDriver is designed to control one bipolar stepper motor. You will need one driver per motor.
Q: What is the maximum step frequency?
- A: The maximum step frequency depends on the motor and power supply characteristics. Refer to the L6470 datasheet for detailed timing information.
Q: How do I set the current limit?
- A: The current limit is set via SPI commands. Refer to the L6470 datasheet and the SparkFun AutoDriver library for the correct commands.
Example Code for Arduino UNO
#include <SPI.h>
#include <SparkFunAutoDriver.h>
// Define the chip select pin for the AutoDriver
#define CSPin 10
// Create an instance of the AutoDriver
AutoDriver motor(CSPin);
void setup() {
// Start the SPI bus
SPI.begin();
// Reset the AutoDriver
motor.resetSettings();
// Set the motor current limit (value depends on the motor)
motor.setCurrent(100); // 1A current limit
// Set the step mode (microstepping)
motor.setStepMode(STEP_FS_128); // Full step with 1/128 microstepping
// Enable the motor
motor.enable();
}
void loop() {
// Move the motor one step forward
motor.move(FWD, 1);
delay(100);
// Move the motor one step backward
motor.move(REV, 1);
delay(100);
}
Note: The above code is a simple example to demonstrate basic motor movement. For more advanced features and configurations, refer to the SparkFun AutoDriver library documentation and the L6470 datasheet.