How to Use Driver Motor DC Brushless 36V: Examples, Pinouts, and Specs

Introduction
The Driver Motor DC Brushless 36V is a high-performance motor driver designed to control the speed and direction of 36V brushless DC (BLDC) motors. Manufactured by Driver Motor with the part ID DC 36V, this driver ensures efficient operation and precise control, making it ideal for a wide range of applications. It is commonly used in robotics, electric vehicles, industrial automation, and other systems requiring reliable motor control.
Explore Projects Built with Driver Motor DC Brushless 36V
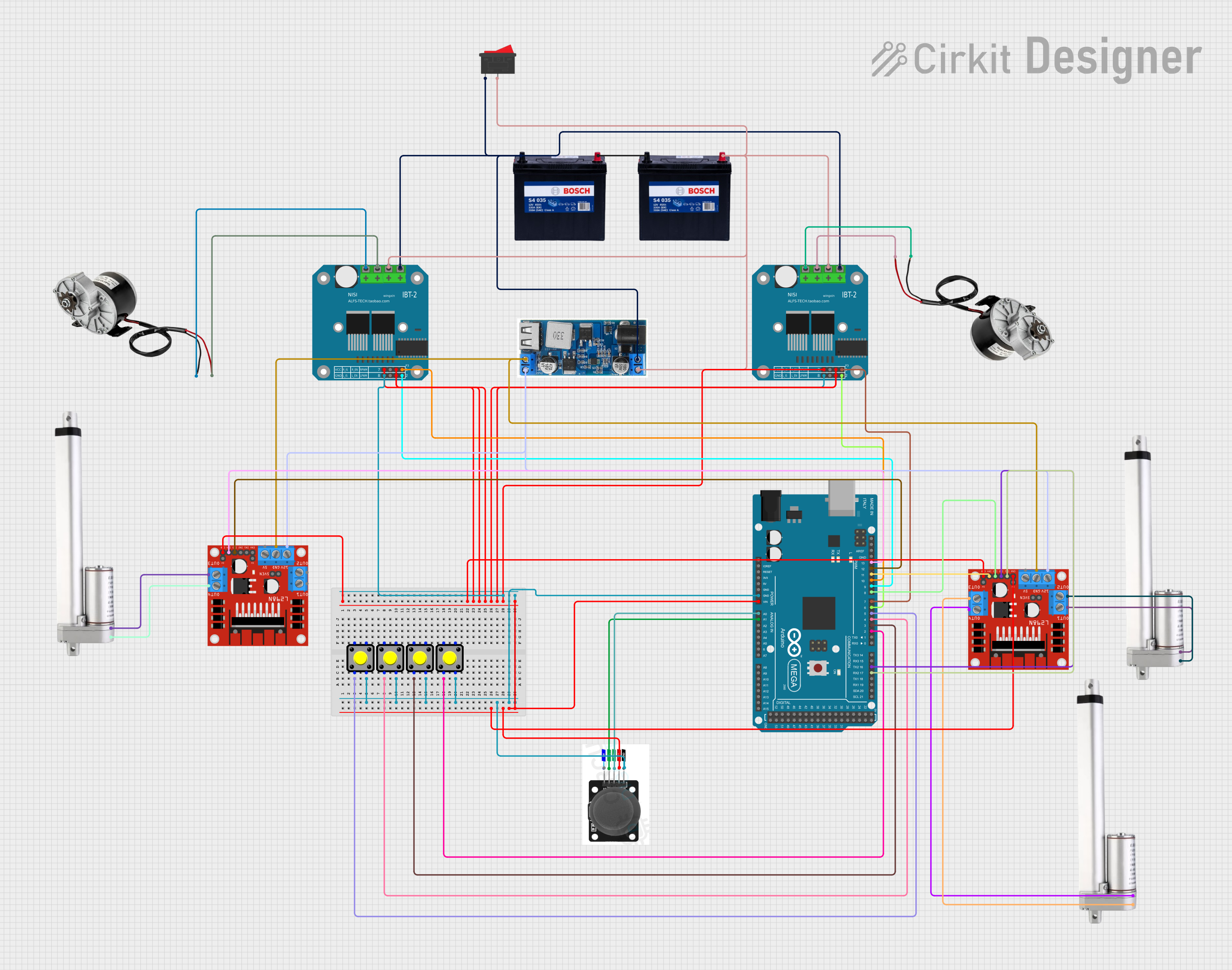

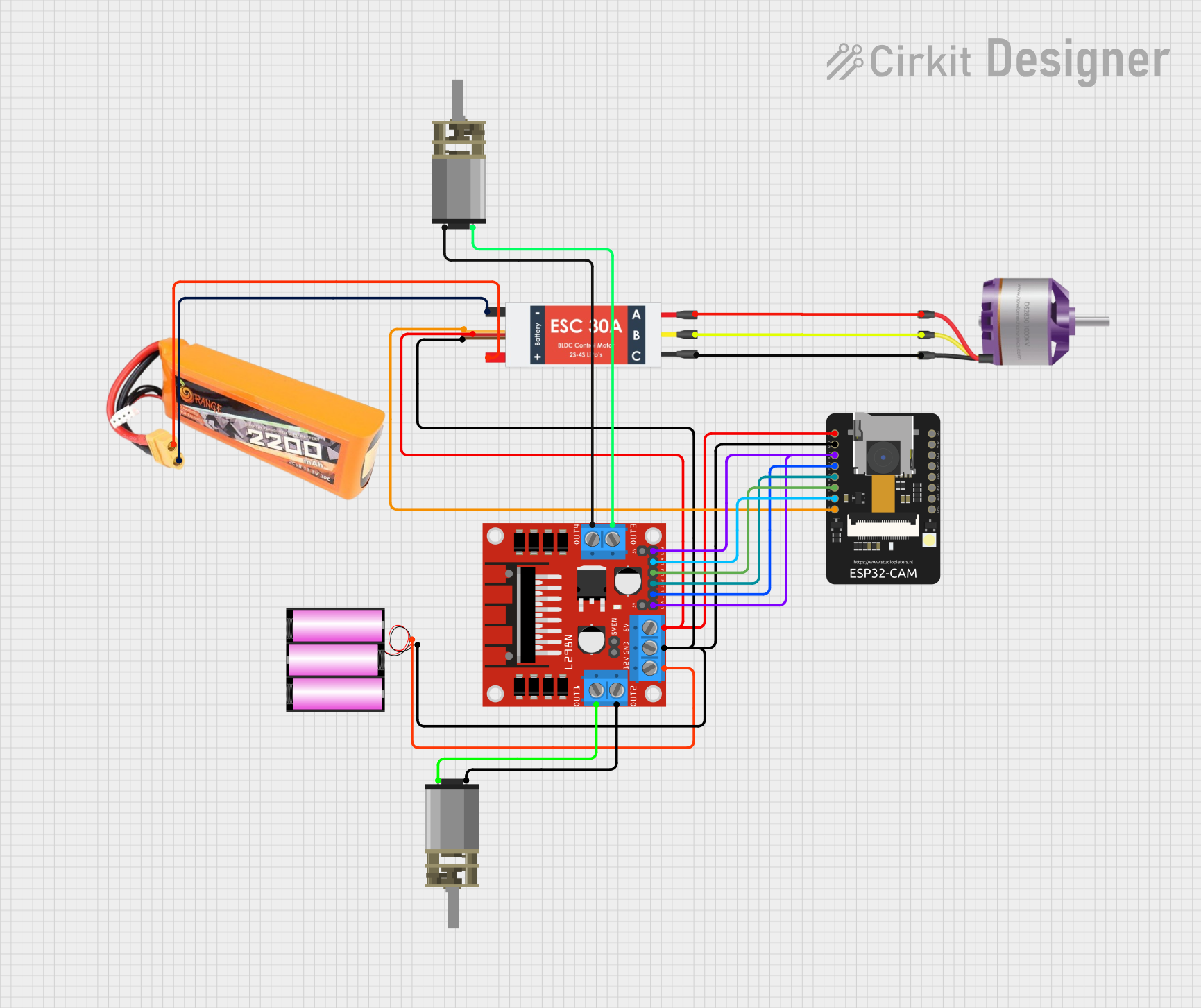

Explore Projects Built with Driver Motor DC Brushless 36V
Common Applications
- Electric scooters and bicycles
- Robotics and automation systems
- Conveyor belts and industrial machinery
- Fans, pumps, and HVAC systems
- DIY projects involving BLDC motors
Technical Specifications
The following table outlines the key technical details of the Driver Motor DC Brushless 36V:
| Parameter | Value |
|---|---|
| Input Voltage | 36V DC |
| Output Current | Up to 15A |
| Motor Type Supported | Brushless DC (BLDC) |
| Control Signal Input | PWM (Pulse Width Modulation) |
| Speed Control Range | 0% to 100% |
| Direction Control | Forward/Reverse |
| Operating Temperature | -20°C to 60°C |
| Dimensions | 100mm x 60mm x 25mm |
| Weight | 150g |
Pin Configuration and Descriptions
The Driver Motor DC Brushless 36V features the following pin configuration:
| Pin Name | Description |
|---|---|
| VCC | Power input (36V DC) |
| GND | Ground connection |
| U, V, W | Motor phase connections (connect to the BLDC motor's U, V, and W terminals) |
| PWM | PWM input for speed control (accepts 0-5V PWM signal) |
| DIR | Direction control input (logic HIGH for forward, LOW for reverse) |
| EN | Enable pin (logic HIGH to enable the driver, LOW to disable) |
| FG | Feedback signal output (provides motor speed feedback as a pulse signal) |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect a 36V DC power supply to the
VCCandGNDpins of the driver. - Motor Connection: Connect the BLDC motor's U, V, and W terminals to the corresponding
U,V, andWpins on the driver. - Control Signals:
- Connect a PWM signal (0-5V) to the
PWMpin for speed control. - Use the
DIRpin to set the motor's direction (HIGH for forward, LOW for reverse). - Use the
ENpin to enable or disable the driver (HIGH to enable, LOW to disable).
- Connect a PWM signal (0-5V) to the
- Feedback: If needed, connect the
FGpin to a microcontroller or monitoring system to receive motor speed feedback.
Important Considerations and Best Practices
- Ensure the power supply voltage is stable and within the specified range (36V DC).
- Use appropriate heat dissipation methods (e.g., heatsinks) if the driver operates at high currents for extended periods.
- Avoid reversing the polarity of the power supply to prevent damage to the driver.
- Use a properly rated BLDC motor that matches the driver's specifications.
- For PWM control, ensure the signal frequency is within the recommended range (typically 1kHz to 20kHz).
Example: Connecting to an Arduino UNO
The Driver Motor DC Brushless 36V can be easily controlled using an Arduino UNO. Below is an example code snippet for controlling motor speed and direction:
// Define pin connections
const int pwmPin = 9; // PWM signal for speed control
const int dirPin = 8; // Direction control
const int enPin = 7; // Enable pin
void setup() {
// Set pin modes
pinMode(pwmPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(enPin, OUTPUT);
// Enable the motor driver
digitalWrite(enPin, HIGH);
}
void loop() {
// Set motor direction to forward
digitalWrite(dirPin, HIGH);
// Gradually increase motor speed
for (int speed = 0; speed <= 255; speed++) {
analogWrite(pwmPin, speed); // Set PWM duty cycle (0-255)
delay(20); // Wait 20ms
}
// Gradually decrease motor speed
for (int speed = 255; speed >= 0; speed--) {
analogWrite(pwmPin, speed);
delay(20);
}
// Set motor direction to reverse
digitalWrite(dirPin, LOW);
// Repeat the speed ramp-up and ramp-down
for (int speed = 0; speed <= 255; speed++) {
analogWrite(pwmPin, speed);
delay(20);
}
for (int speed = 255; speed >= 0; speed--) {
analogWrite(pwmPin, speed);
delay(20);
}
}
Troubleshooting and FAQs
Common Issues and Solutions
Motor Does Not Spin:
- Check the power supply voltage and ensure it is 36V DC.
- Verify that the
ENpin is set to HIGH to enable the driver. - Ensure the motor is properly connected to the
U,V, andWpins.
Motor Spins in the Wrong Direction:
- Check the logic level of the
DIRpin. Set it to HIGH for forward and LOW for reverse. - Verify the motor's wiring to ensure the U, V, and W connections are correct.
- Check the logic level of the
Motor Speed is Unstable:
- Ensure the PWM signal is clean and within the recommended frequency range.
- Check for loose connections or faulty wiring.
Driver Overheats:
- Ensure the current drawn by the motor does not exceed the driver's maximum rating (15A).
- Use a heatsink or active cooling to dissipate heat.
FAQs
Q: Can I use this driver with a 24V BLDC motor?
A: No, this driver is specifically designed for 36V BLDC motors. Using it with a lower voltage motor may result in suboptimal performance or damage.
Q: What is the recommended PWM frequency for speed control?
A: The recommended PWM frequency is between 1kHz and 20kHz for optimal performance.
Q: Can I use this driver with a brushed DC motor?
A: No, this driver is designed exclusively for brushless DC motors and is not compatible with brushed motors.
Q: How can I monitor the motor's speed?
A: Connect the FG pin to a microcontroller or frequency counter to measure the feedback signal, which corresponds to the motor's speed.