How to Use SparkFun Haptic Motor Driver - DRV2605L: Examples, Pinouts, and Specs
Introduction
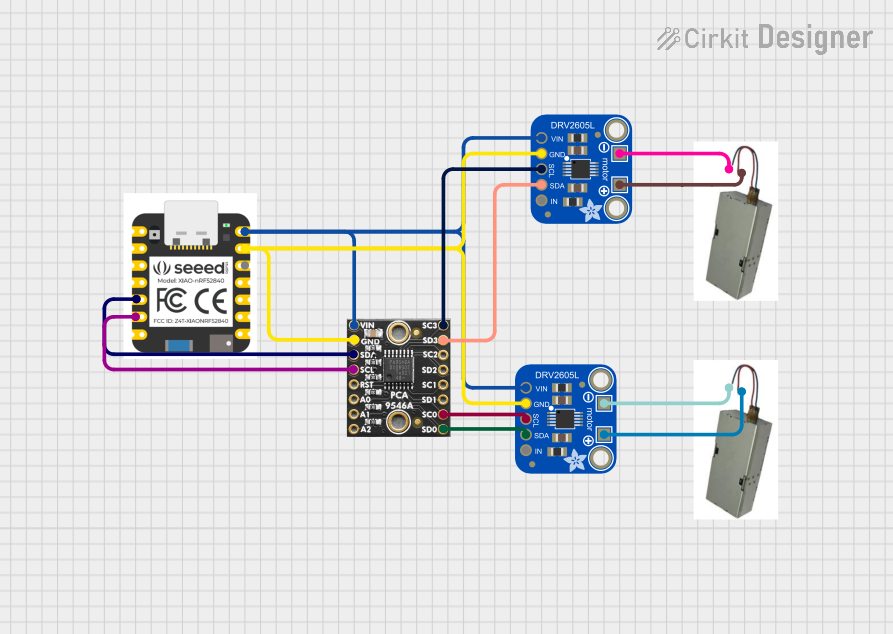
The SparkFun Haptic Motor Driver is an advanced motor driver IC designed specifically for driving haptic feedback motors, also known as vibration motors. This component utilizes the DRV2605L chip from Texas Instruments, which is capable of providing a wide array of haptic feedback functionalities. It is commonly used in applications where tactile feedback is desired, such as in wearable devices, gaming controllers, smartphones, and touch-enabled devices.
Explore Projects Built with SparkFun Haptic Motor Driver - DRV2605L
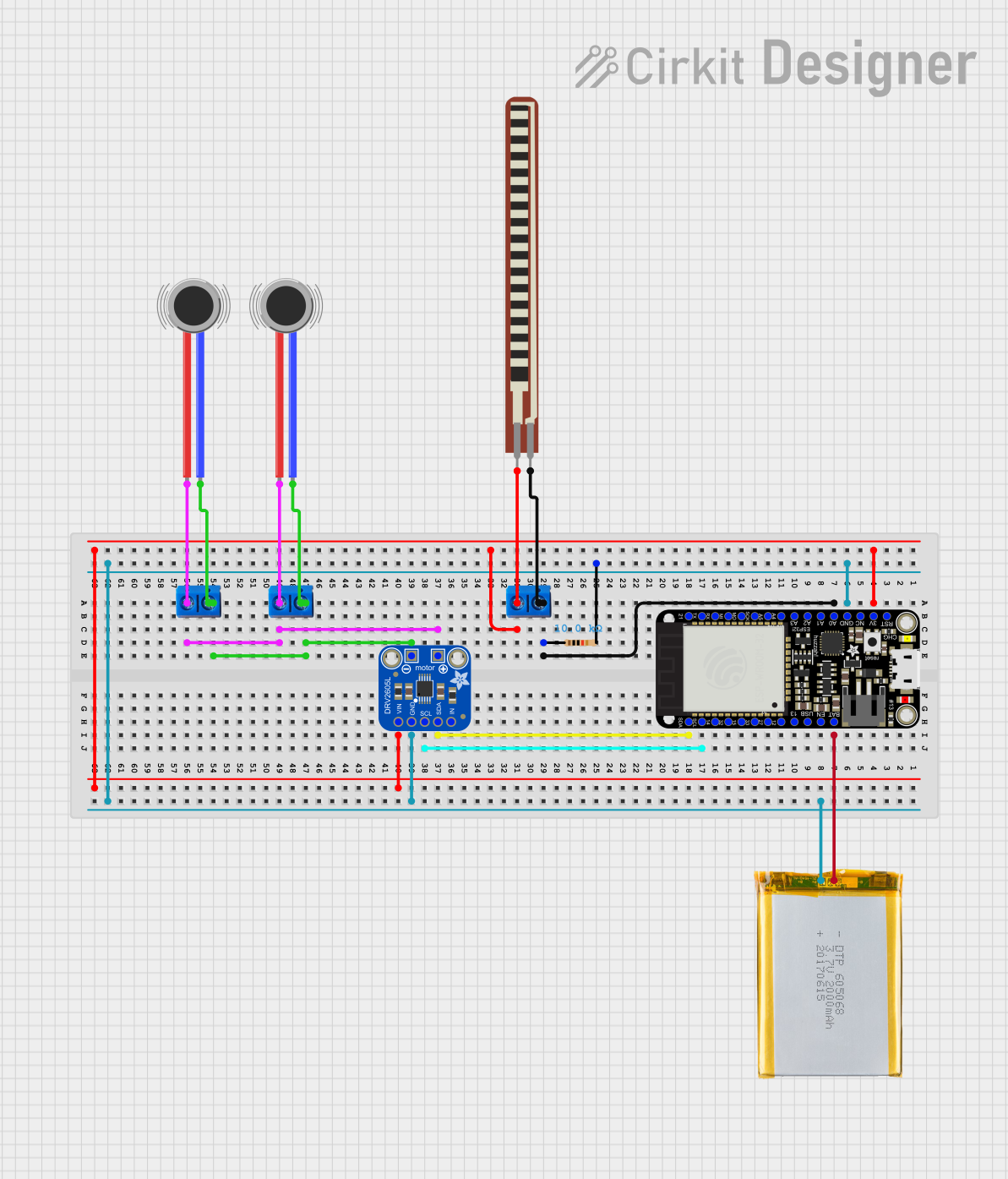
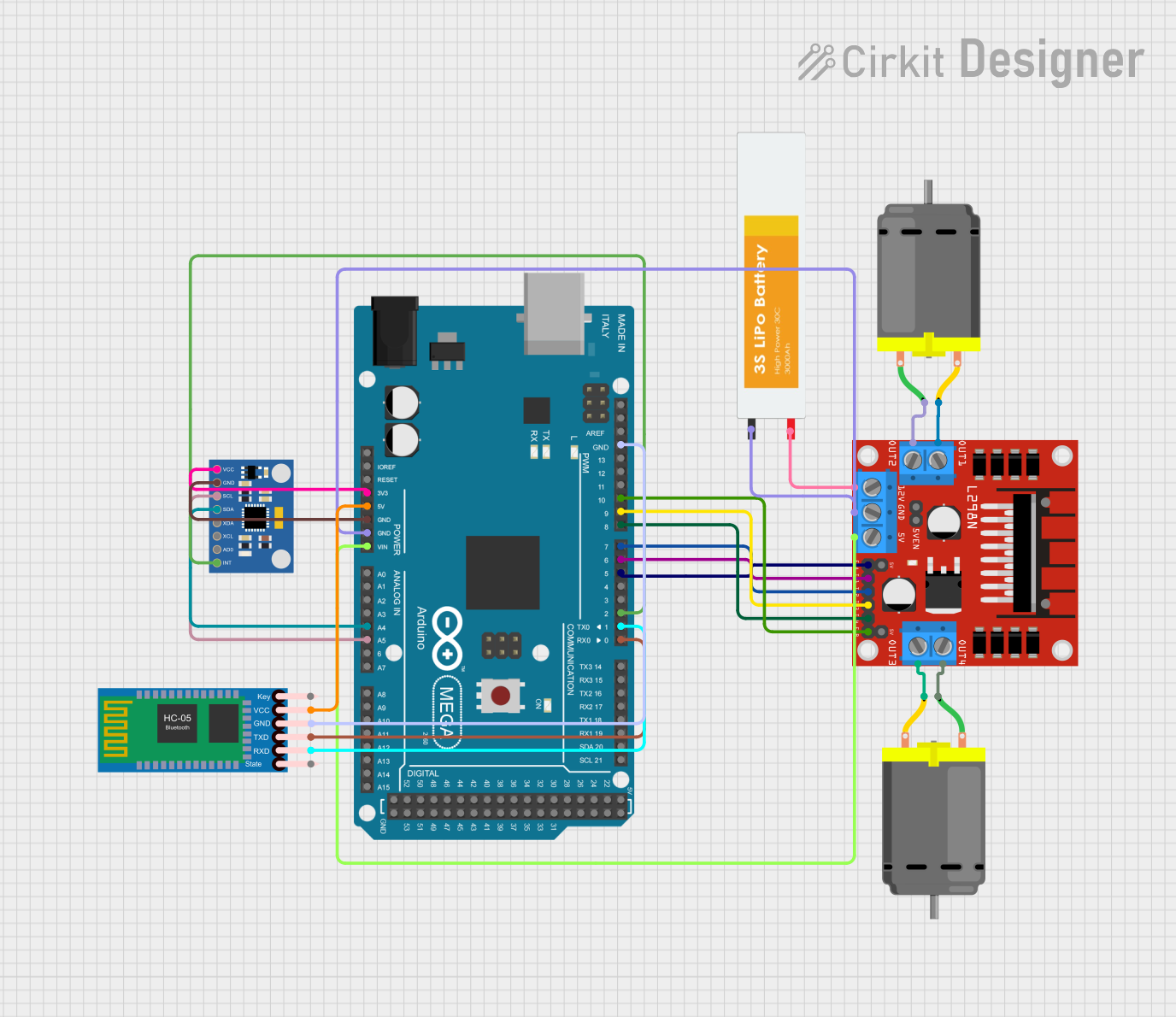
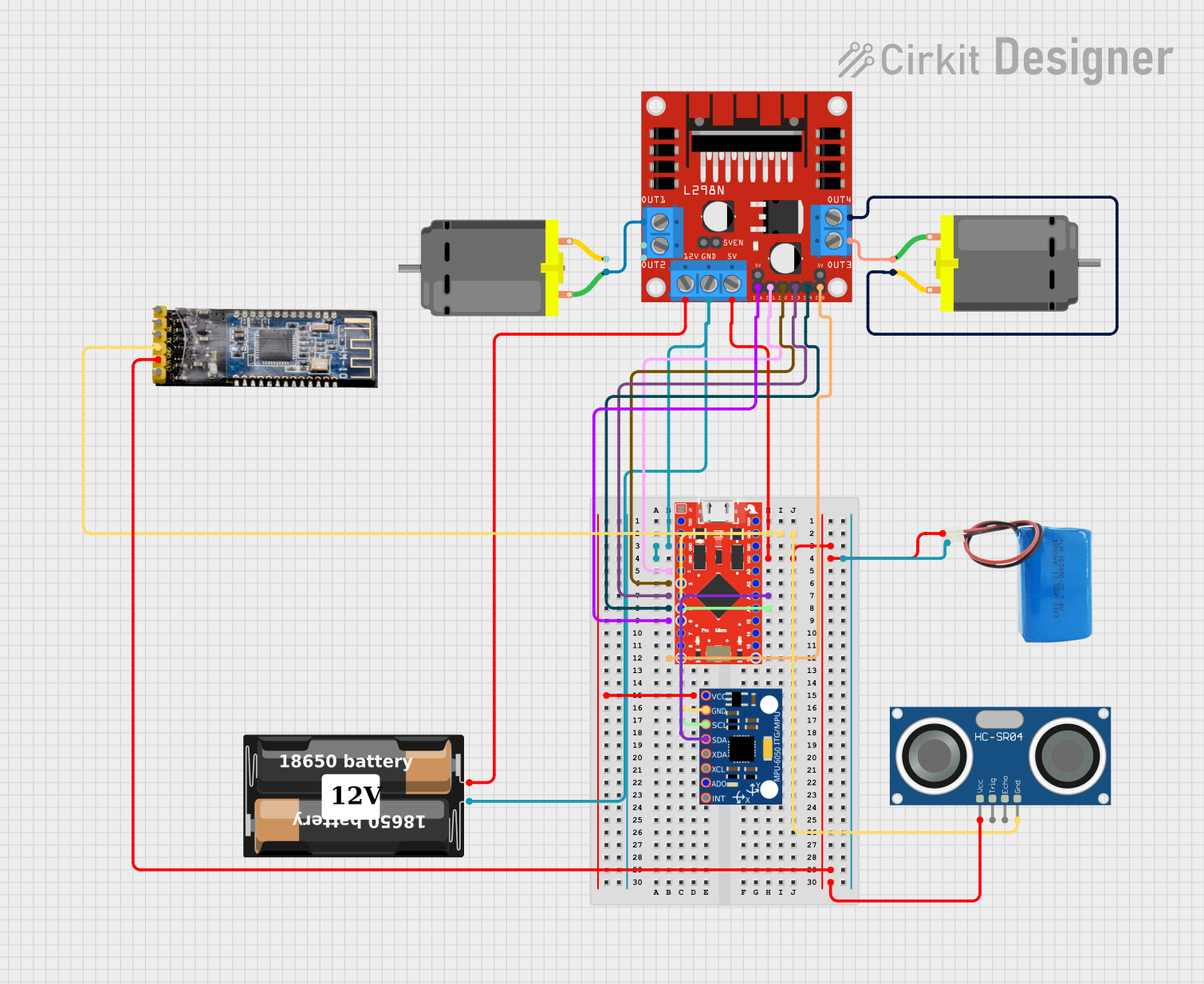
Explore Projects Built with SparkFun Haptic Motor Driver - DRV2605L
Technical Specifications
Key Technical Details
- Supply Voltage (VCC): 2V - 5.2V
- Operating Current: 10mA (typical), 150mA (max)
- Haptic Motor Voltage: 2V - 3.6V
- Output Drive Capability: LRA (Linear Resonant Actuator) and ERM (Eccentric Rotating Mass) motors
- I2C Address: 0x5A (default)
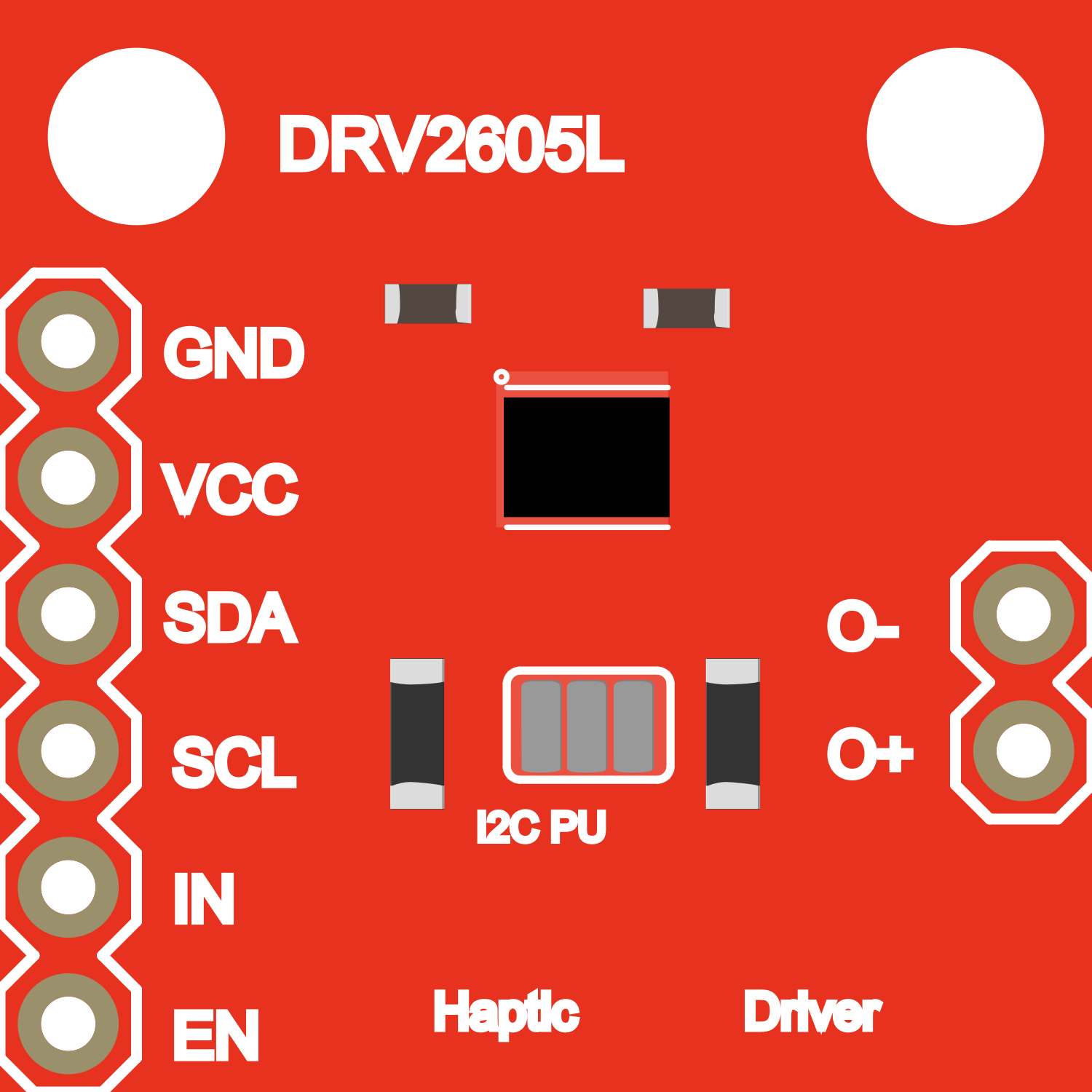
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | SCL | I2C clock line |
| 2 | SDA | I2C data line |
| 3 | VDD | Power supply (2V - 5.2V) |
| 4 | GND | Ground connection |
| 5 | EN | Enable pin (active high) |
| 6 | IN/TRIG | Trigger input for driving the actuator |
| 7 | OUT+ | Positive output for the haptic motor |
| 8 | OUT- | Negative output for the haptic motor |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect the VDD pin to a 2V - 5.2V power supply and the GND pin to the ground.
- I2C Communication: Connect the SCL and SDA pins to the corresponding I2C clock and data lines on your microcontroller.
- Enable Pin: The EN pin can be connected to a digital output on your microcontroller to enable or disable the driver.
- Motor Connection: Connect your haptic motor to the OUT+ and OUT- pins.
- Triggering Feedback: Use the IN/TRIG pin to trigger pre-defined haptic effects.
Important Considerations and Best Practices
- Ensure that the power supply voltage does not exceed the maximum rating of 5.2V.
- Use pull-up resistors on the I2C lines if they are not already present on the microcontroller board.
- Avoid long wires for the haptic motor connections to minimize voltage drops and potential interference.
- When using the EN pin, ensure that it is driven high to enable the device and low to disable it.
Example Code for Arduino UNO
#include <Wire.h>
#include "SparkFun_DRV2605L.h"
// Create an instance of the DRV2605L library
SparkFun_DRV2605L haptic;
void setup() {
Wire.begin(); // Initialize I2C
Serial.begin(9600); // Start serial for output
if (haptic.begin() == false) {
Serial.println("DRV2605L not detected. Please check wiring.");
while (1); // Halt if device is not detected
}
haptic.setMode(DRV2605L_MODE_INTTRIG); // Set to internal trigger mode
}
void loop() {
haptic.setWaveform(0, 1); // Strong click, 100% amplitude
haptic.setWaveform(1, 0); // End waveform sequence with a zero
haptic.go(); // Play the effect
delay(1000); // Wait for a second
}
Troubleshooting and FAQs
Common Issues
- Motor not vibrating: Ensure that the motor is properly connected to the OUT+ and OUT- pins and that the power supply is within the specified range.
- No communication with the IC: Check the I2C connections, including pull-up resistors, and verify that the correct I2C address is being used in the code.
- Weak vibration: Make sure that the motor is within the voltage and current specifications. Also, check for any loose connections.
Solutions and Tips for Troubleshooting
- Double-check all connections, especially the power supply and motor connections.
- Use a multimeter to verify that the voltage levels on the VDD and motor pins are correct.
- Ensure that the I2C lines are not being shared with other devices that might cause conflicts.
- If using the EN pin, verify that it is being driven to the correct logic level for enabling the device.
FAQs
Q: Can the DRV2605L drive multiple motors? A: No, the DRV2605L is designed to drive a single haptic motor.
Q: Is it possible to customize the haptic patterns? A: Yes, the DRV2605L allows for custom waveforms to be loaded into the device for a variety of haptic patterns.
Q: What types of motors can be driven by the DRV2605L? A: The DRV2605L can drive both LRA and ERM type haptic motors.
Q: How do I know if the DRV2605L is functioning properly? A: You can use the diagnostic mode of the DRV2605L to check the functionality of the connected motor and the driver IC itself.
For further assistance, consult the datasheet of the DRV2605L or contact SparkFun's technical support.