How to Use Moteur 25GA370 12V: Examples, Pinouts, and Specs

Introduction
The Moteur 25GA370 12V is a compact and efficient 12V DC motor designed for a wide range of applications. Its small size and high torque output make it an ideal choice for robotics, small machinery, and automation projects. This motor is particularly valued for its reliability, low power consumption, and ease of integration into various systems.
Explore Projects Built with Moteur 25GA370 12V
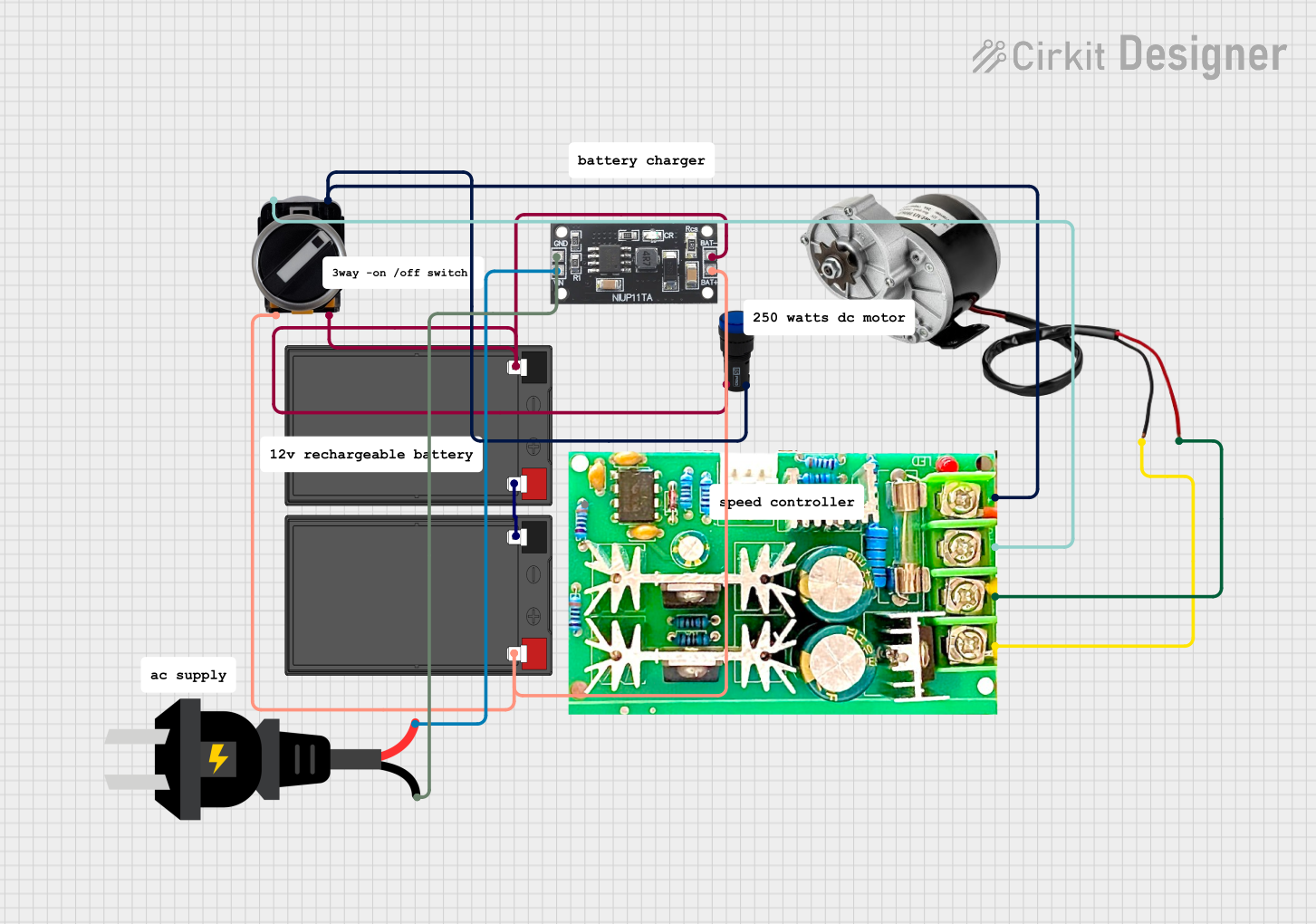
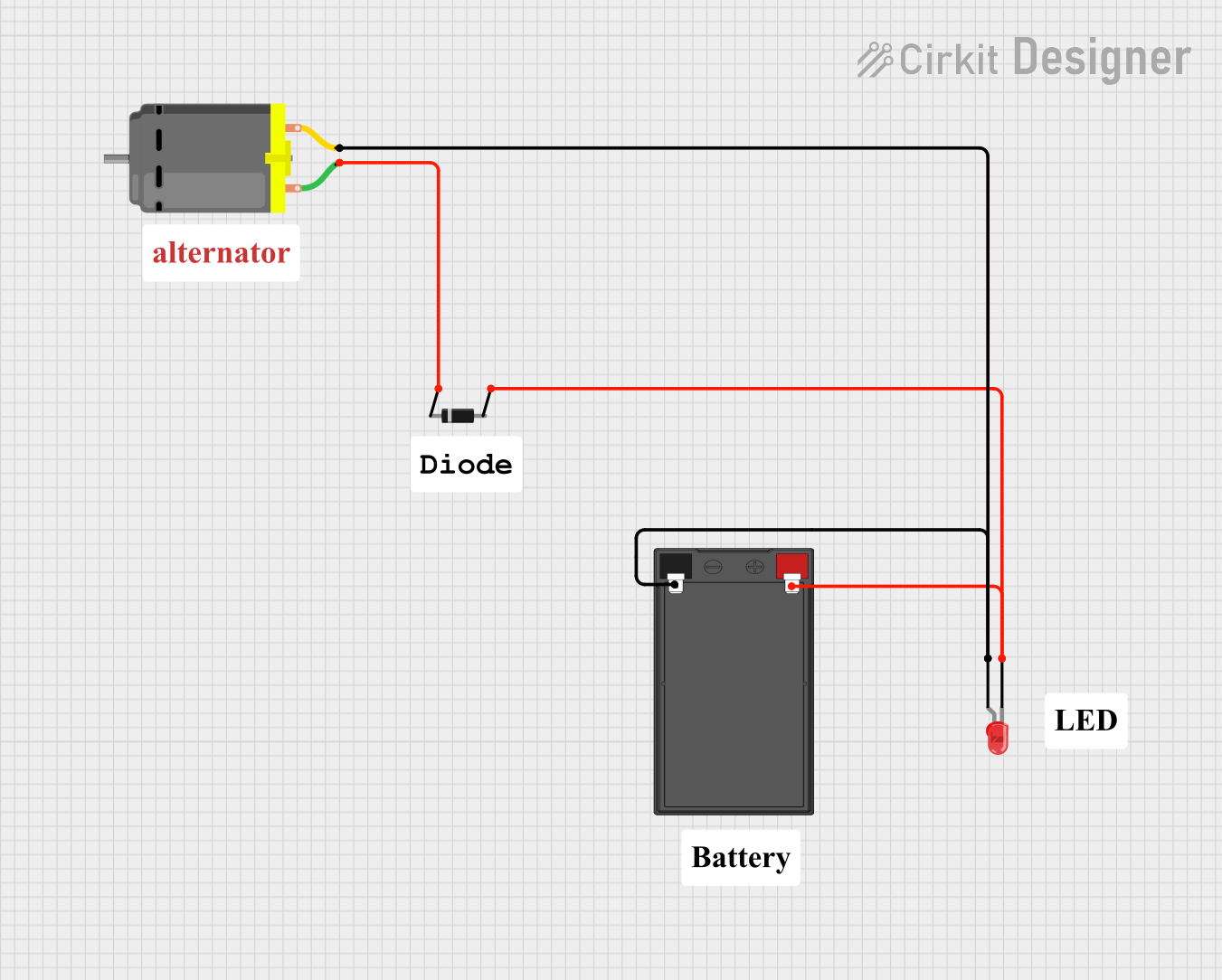

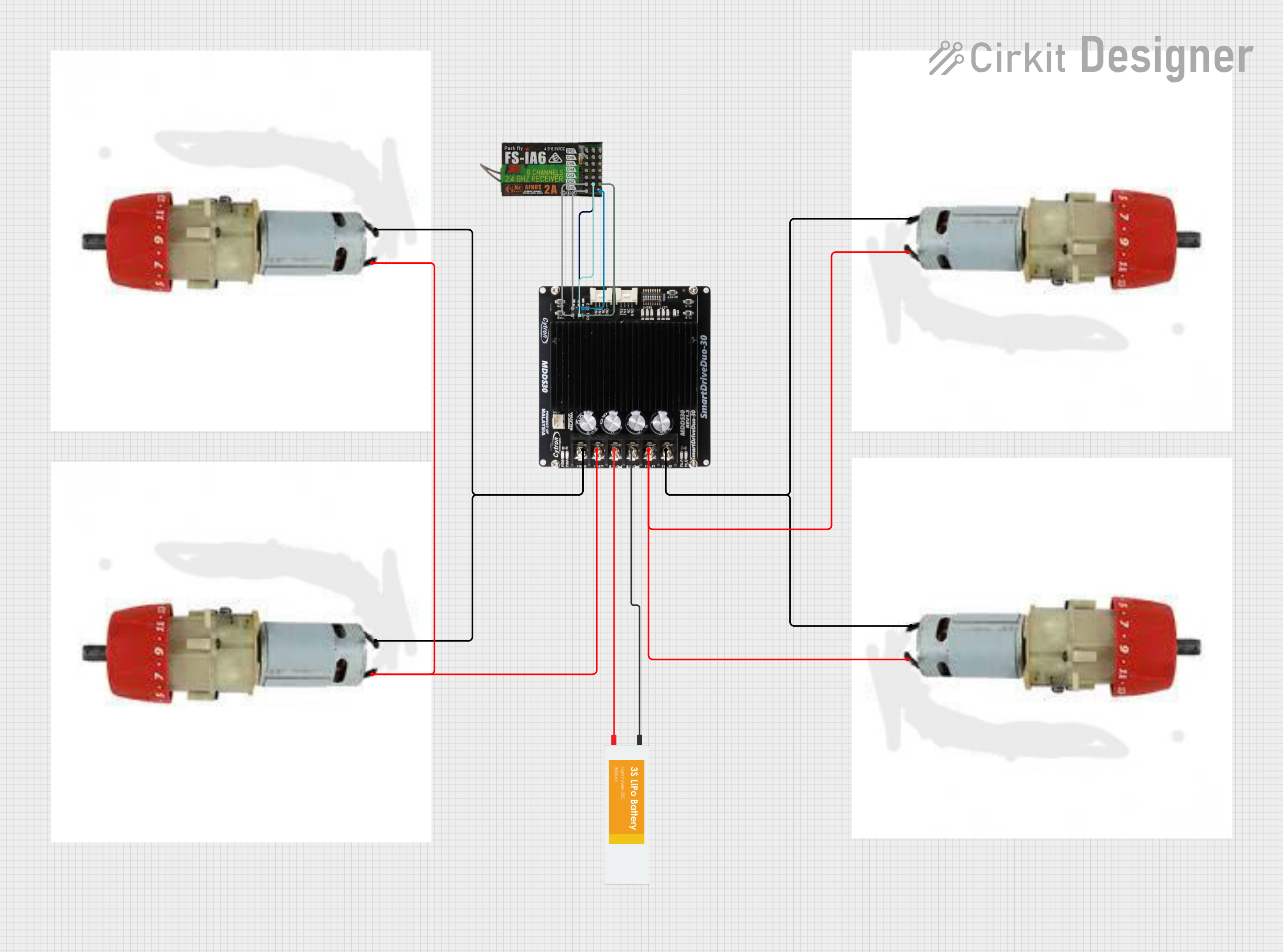
Explore Projects Built with Moteur 25GA370 12V
Common Applications
- Robotics (e.g., mobile robots, robotic arms)
- Small conveyor systems
- Automated mechanisms (e.g., door openers, actuators)
- DIY projects and hobbyist applications
- Educational kits for learning motor control
Technical Specifications
The following table outlines the key technical details of the Moteur 25GA370 12V:
| Parameter | Value |
|---|---|
| Operating Voltage | 12V DC |
| No-Load Speed | ~6000 RPM |
| No-Load Current | ~70 mA |
| Stall Torque | ~1.5 kg·cm |
| Stall Current | ~1.2 A |
| Gearbox Ratio | 1:30 (varies by model) |
| Shaft Diameter | 4 mm |
| Motor Dimensions | 25 mm (diameter) x 37 mm (length) |
| Weight | ~100 g |
Pin Configuration
The Moteur 25GA370 12V typically has two terminals for electrical connections:
| Pin | Description |
|---|---|
| + | Positive terminal (Vcc) |
| - | Negative terminal (GND) |
Note: The motor's direction of rotation can be reversed by swapping the polarity of the connections.
Usage Instructions
How to Use the Moteur 25GA370 12V in a Circuit
- Power Supply: Connect the motor to a 12V DC power source. Ensure the power supply can provide sufficient current (at least 1.5A) to handle stall conditions.
- Motor Driver: Use a motor driver (e.g., L298N, L293D, or a MOSFET-based H-bridge) to control the motor. Directly connecting the motor to a microcontroller is not recommended due to high current requirements.
- Polarity Control: To change the motor's direction, reverse the polarity of the voltage applied to the terminals.
- Speed Control: Use Pulse Width Modulation (PWM) to control the motor's speed. Most motor drivers support PWM input.
Important Considerations
- Current Limiting: Ensure your motor driver or power supply can handle the stall current (~1.2A) to prevent damage.
- Heat Dissipation: Prolonged operation at high loads may cause the motor to heat up. Allow for adequate cooling.
- Mounting: Secure the motor using appropriate brackets to prevent vibration or misalignment.
- Noise Suppression: Add capacitors (e.g., 0.1 µF) across the motor terminals to reduce electrical noise.
Example: Controlling the Motor with Arduino UNO
Below is an example of how to control the Moteur 25GA370 12V using an Arduino UNO and an L298N motor driver:
// Arduino code to control the Moteur 25GA370 12V using PWM
// and an L298N motor driver
// Define motor control pins
const int ENA = 9; // PWM pin for speed control
const int IN1 = 7; // Direction control pin 1
const int IN2 = 8; // Direction control pin 2
void setup() {
// Set motor control pins as outputs
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
}
void loop() {
// Rotate motor in one direction
digitalWrite(IN1, HIGH); // Set IN1 high
digitalWrite(IN2, LOW); // Set IN2 low
analogWrite(ENA, 128); // Set speed to 50% (PWM value: 128)
delay(2000); // Run for 2 seconds
// Stop the motor
analogWrite(ENA, 0); // Set speed to 0
delay(1000); // Wait for 1 second
// Rotate motor in the opposite direction
digitalWrite(IN1, LOW); // Set IN1 low
digitalWrite(IN2, HIGH); // Set IN2 high
analogWrite(ENA, 200); // Set speed to ~78% (PWM value: 200)
delay(2000); // Run for 2 seconds
// Stop the motor
analogWrite(ENA, 0); // Set speed to 0
delay(1000); // Wait for 1 second
}
Note: Adjust the PWM values (0–255) to control the motor speed as needed.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Does Not Spin
- Cause: Insufficient power supply or loose connections.
- Solution: Verify that the power supply provides 12V and sufficient current. Check all connections.
Motor Spins in the Wrong Direction
- Cause: Incorrect polarity.
- Solution: Swap the motor's + and - connections or adjust the motor driver control pins.
Motor Overheats
- Cause: Prolonged operation at high loads or stall conditions.
- Solution: Reduce the load on the motor or allow it to cool between operations.
Electrical Noise Interferes with Circuit
- Cause: Motor generates electrical noise during operation.
- Solution: Add capacitors (e.g., 0.1 µF) across the motor terminals to suppress noise.
Motor Driver Overheats
- Cause: Driver is not rated for the motor's current.
- Solution: Use a motor driver with a higher current rating or add a heat sink.
FAQs
Can I use a 9V battery to power the motor?
- While the motor may run at 9V, it will operate at reduced speed and torque. A 12V power supply is recommended for optimal performance.
What is the maximum load the motor can handle?
- The motor can handle a maximum torque of ~1.5 kg·cm under stall conditions. Avoid prolonged operation at stall torque to prevent damage.
Can I connect the motor directly to an Arduino?
- No, the motor requires more current than the Arduino can supply. Always use a motor driver or external power source.
How do I reduce motor noise in my circuit?
- Add capacitors across the motor terminals and use shielded cables for connections.
By following this documentation, you can effectively integrate the Moteur 25GA370 12V into your projects and troubleshoot common issues with ease.