How to Use IRF3205 H-Bridge: Examples, Pinouts, and Specs
Introduction
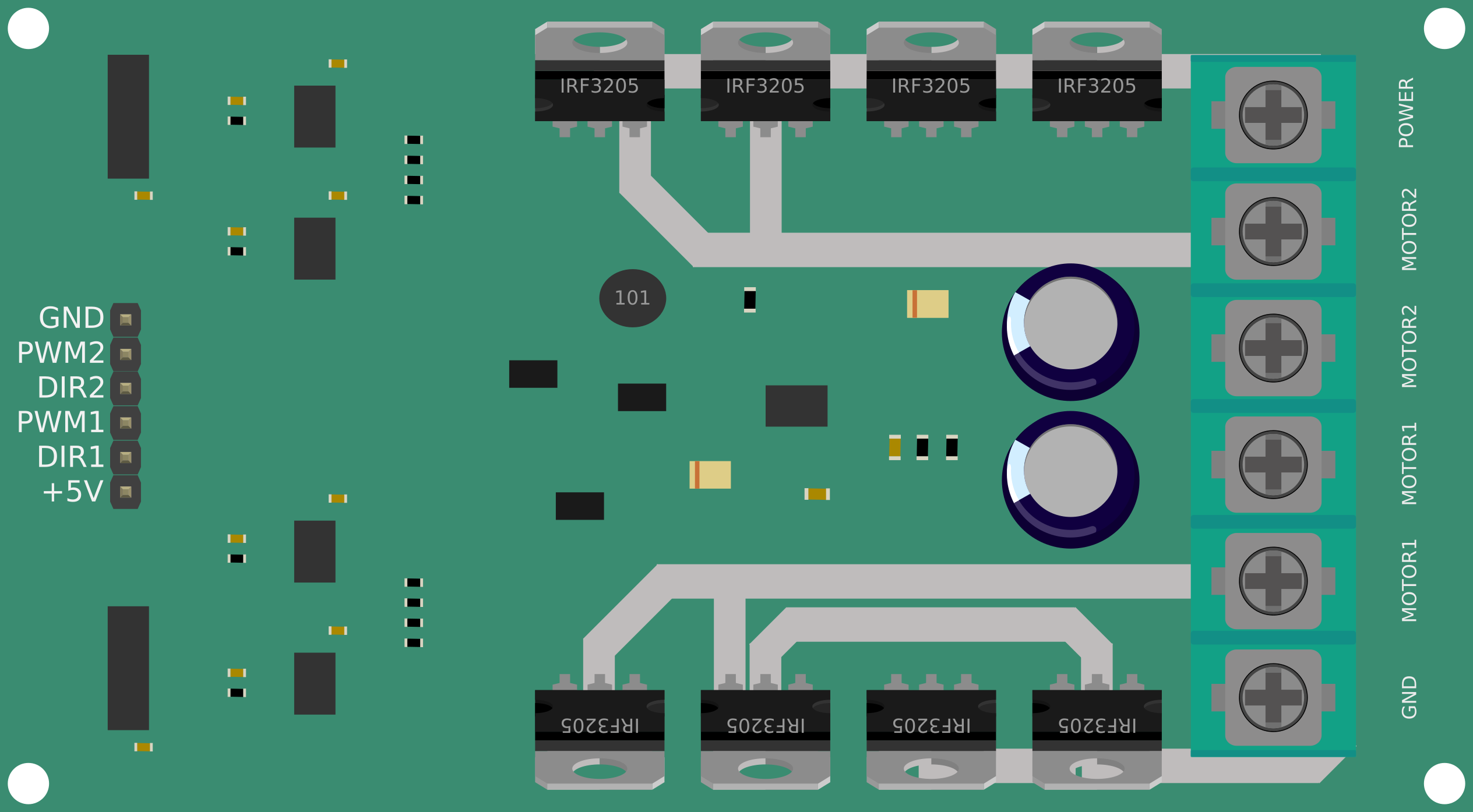
The IRF3205 is a high-speed N-channel MOSFET commonly used in H-bridge configurations for driving motors and other inductive loads. Its low on-resistance and high current handling capabilities make it ideal for efficient power conversion and control applications. The H-bridge configuration allows for bidirectional control of DC motors, making it a popular choice in robotics, motor drivers, and power management systems.
Explore Projects Built with IRF3205 H-Bridge


Explore Projects Built with IRF3205 H-Bridge
Common Applications and Use Cases
- DC motor control in robotics and automation
- Power inverters and converters
- High-current switching applications
- Battery-powered systems
- Stepper motor drivers
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| MOSFET Type | N-Channel |
| Maximum Drain-Source Voltage (VDS) | 55V |
| Maximum Continuous Drain Current (ID) | 110A |
| Gate Threshold Voltage (VGS(th)) | 2.0V - 4.0V |
| Maximum Gate-Source Voltage (VGS) | ±20V |
| RDS(on) (On-Resistance) | 8 mΩ (at VGS = 10V) |
| Power Dissipation (PD) | 200W |
| Operating Temperature Range | -55°C to +175°C |
| Package Type | TO-220 |
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | Gate (G) | Controls the MOSFET switching (connected to PWM) |
| 2 | Drain (D) | Connected to the load (e.g., motor or resistor) |
| 3 | Source (S) | Connected to ground or the negative terminal |
Usage Instructions
How to Use the IRF3205 in an H-Bridge Circuit
H-Bridge Configuration:
An H-bridge consists of four MOSFETs (two IRF3205s for the low side and two P-channel or N-channel MOSFETs for the high side). This configuration allows for bidirectional control of a DC motor by alternating the current flow through the motor.Gate Drive Requirements:
- The IRF3205 requires a gate voltage (VGS) of at least 10V for optimal performance. Use a gate driver circuit or a microcontroller with a logic-level MOSFET driver to ensure proper switching.
- Avoid leaving the gate floating; use a pull-down resistor (e.g., 10kΩ) to prevent accidental switching.
Power Supply Considerations:
- Ensure the power supply voltage does not exceed the maximum VDS rating of 55V.
- Use decoupling capacitors (e.g., 100µF electrolytic and 0.1µF ceramic) near the power supply to reduce noise and voltage spikes.
Heat Dissipation:
- The IRF3205 can handle high currents, but it generates heat during operation. Use a heatsink or active cooling to maintain safe operating temperatures.
Sample Circuit Diagram:
Below is a simplified H-bridge circuit using IRF3205 MOSFETs for motor control:+V (Power Supply) | |----+----+----+ | | | D1 D2 Motor | | | GND GND GND
Arduino UNO Example Code
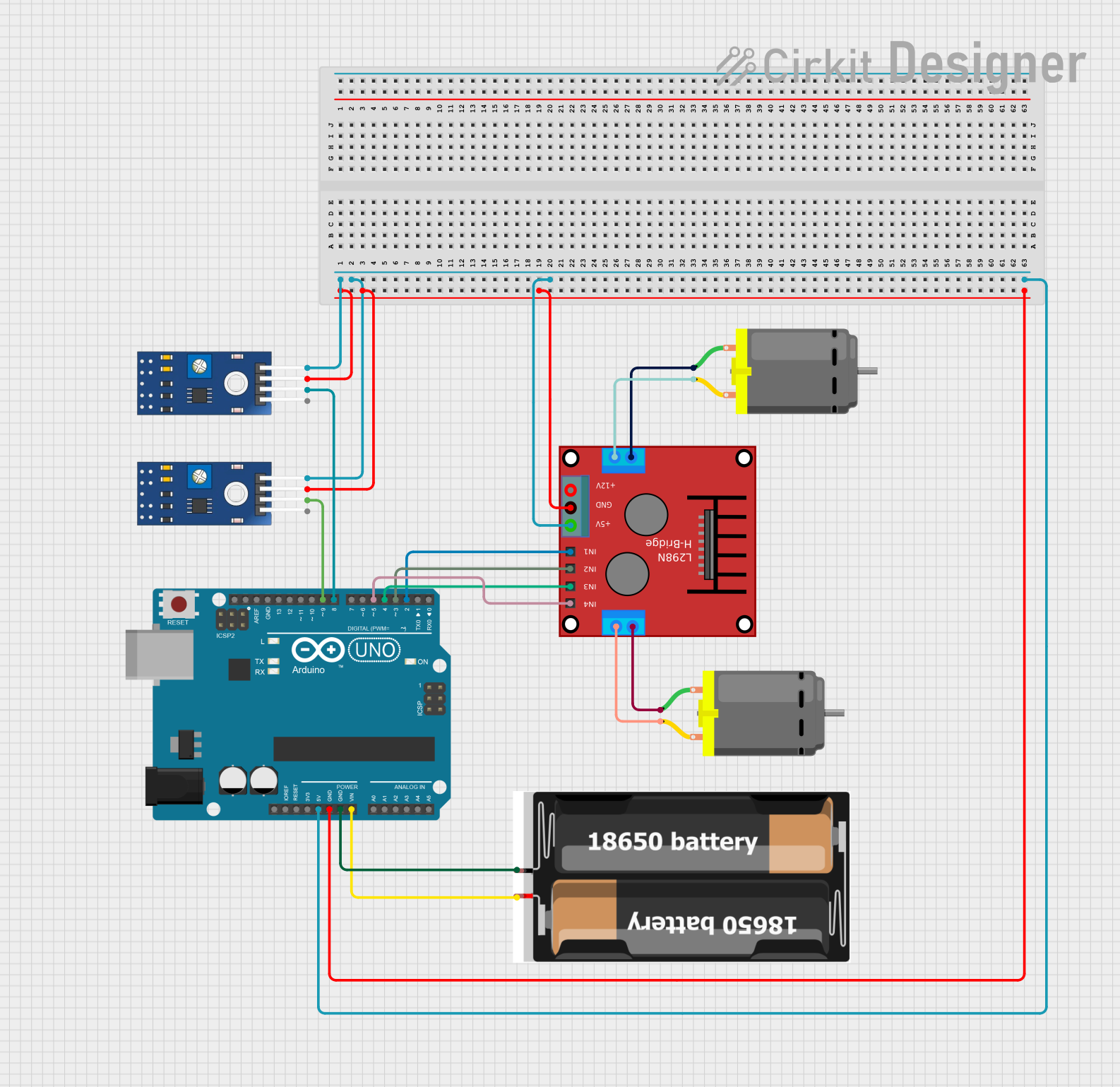
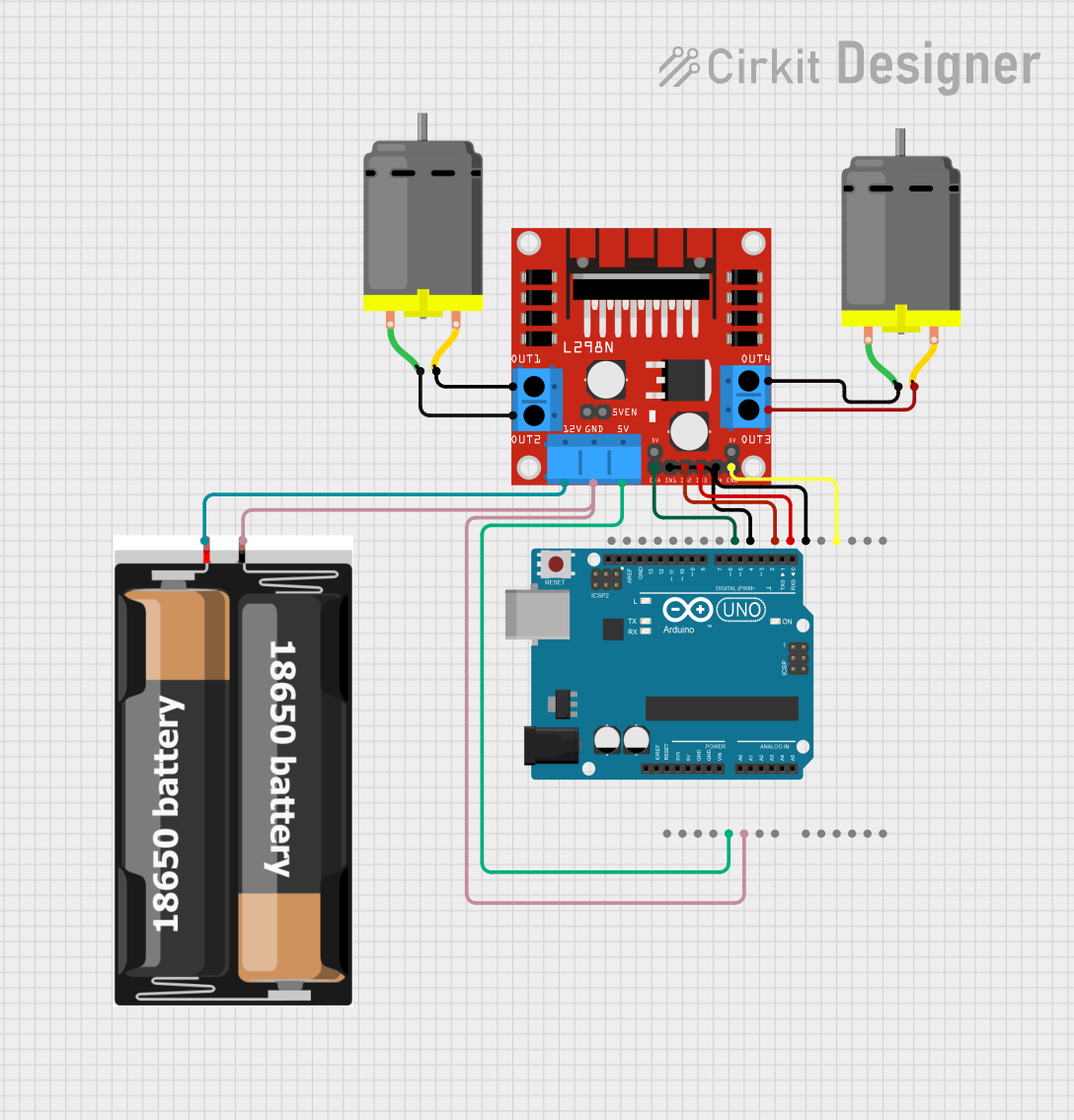
The following code demonstrates how to control a DC motor using an H-bridge with IRF3205 MOSFETs and an Arduino UNO.
// Define motor control pins
const int motorPin1 = 9; // PWM pin for one side of the H-bridge
const int motorPin2 = 10; // PWM pin for the other side of the H-bridge
void setup() {
// Set motor pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
}
void loop() {
// Rotate motor in one direction
analogWrite(motorPin1, 255); // Full speed forward
analogWrite(motorPin2, 0); // Stop the other side
delay(2000); // Run for 2 seconds
// Rotate motor in the opposite direction
analogWrite(motorPin1, 0); // Stop one side
analogWrite(motorPin2, 255); // Full speed reverse
delay(2000); // Run for 2 seconds
// Stop the motor
analogWrite(motorPin1, 0);
analogWrite(motorPin2, 0);
delay(1000); // Pause for 1 second
}
Important Considerations and Best Practices
- Gate Drive Voltage: Ensure the gate voltage is sufficient to fully turn on the MOSFET (10V recommended).
- Flyback Diodes: Use flyback diodes across the motor terminals to protect the MOSFETs from voltage spikes caused by inductive loads.
- Current Limiting: Add a current-limiting resistor or fuse to prevent damage to the MOSFETs in case of a short circuit.
- PCB Layout: Use wide traces for high-current paths and minimize the distance between the MOSFETs and the load.
Troubleshooting and FAQs
Common Issues and Solutions
MOSFET Overheating:
- Cause: Insufficient cooling or high RDS(on).
- Solution: Attach a heatsink or use active cooling. Ensure the gate voltage is at least 10V to minimize on-resistance.
Motor Not Rotating:
- Cause: Incorrect wiring or insufficient gate drive voltage.
- Solution: Double-check the circuit connections and ensure the gate voltage is within the recommended range.
MOSFET Not Switching:
- Cause: Floating gate or damaged MOSFET.
- Solution: Add a pull-down resistor to the gate and test the MOSFET with a multimeter.
Voltage Spikes Damaging the MOSFET:
- Cause: Inductive load without flyback diodes.
- Solution: Add flyback diodes across the motor terminals to suppress voltage spikes.
FAQs
Q1: Can I use the IRF3205 directly with a 5V logic signal from a microcontroller?
A1: No, the IRF3205 requires a gate voltage of at least 10V for optimal performance. Use a logic-level MOSFET driver or a gate driver circuit.
Q2: What is the maximum motor current the IRF3205 can handle?
A2: The IRF3205 can handle up to 110A, but ensure proper cooling and consider the power dissipation limits.
Q3: Can I use the IRF3205 for high-frequency switching?
A3: Yes, the IRF3205 is suitable for high-frequency switching, but ensure the gate driver can provide sufficient current for fast switching.
Q4: Do I need to use all four IRF3205 MOSFETs in an H-bridge?
A4: Typically, two IRF3205s are used for the low side, while the high side may use P-channel MOSFETs or other N-channel MOSFETs with a bootstrap circuit.