How to Use TMC 2209: Examples, Pinouts, and Specs
Introduction
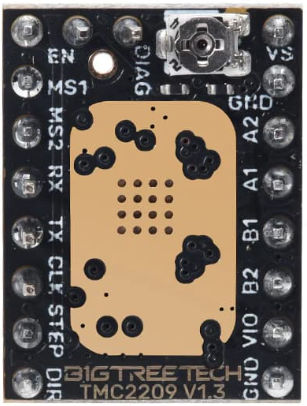
The TMC 2209 is a highly efficient and versatile stepper motor driver designed for applications requiring precise motor control and silent operation. It is widely used in 3D printers, CNC machines, and other motion control systems. The TMC 2209 features advanced technologies such as StealthChop2 for quiet operation, SpreadCycle for high torque, and sensorless homing for simplified hardware design. Its microstepping capabilities allow for smooth and accurate motor movements, making it a popular choice for precision applications.
Explore Projects Built with TMC 2209

Explore Projects Built with TMC 2209
Common Applications
- 3D printers for silent and precise motor control
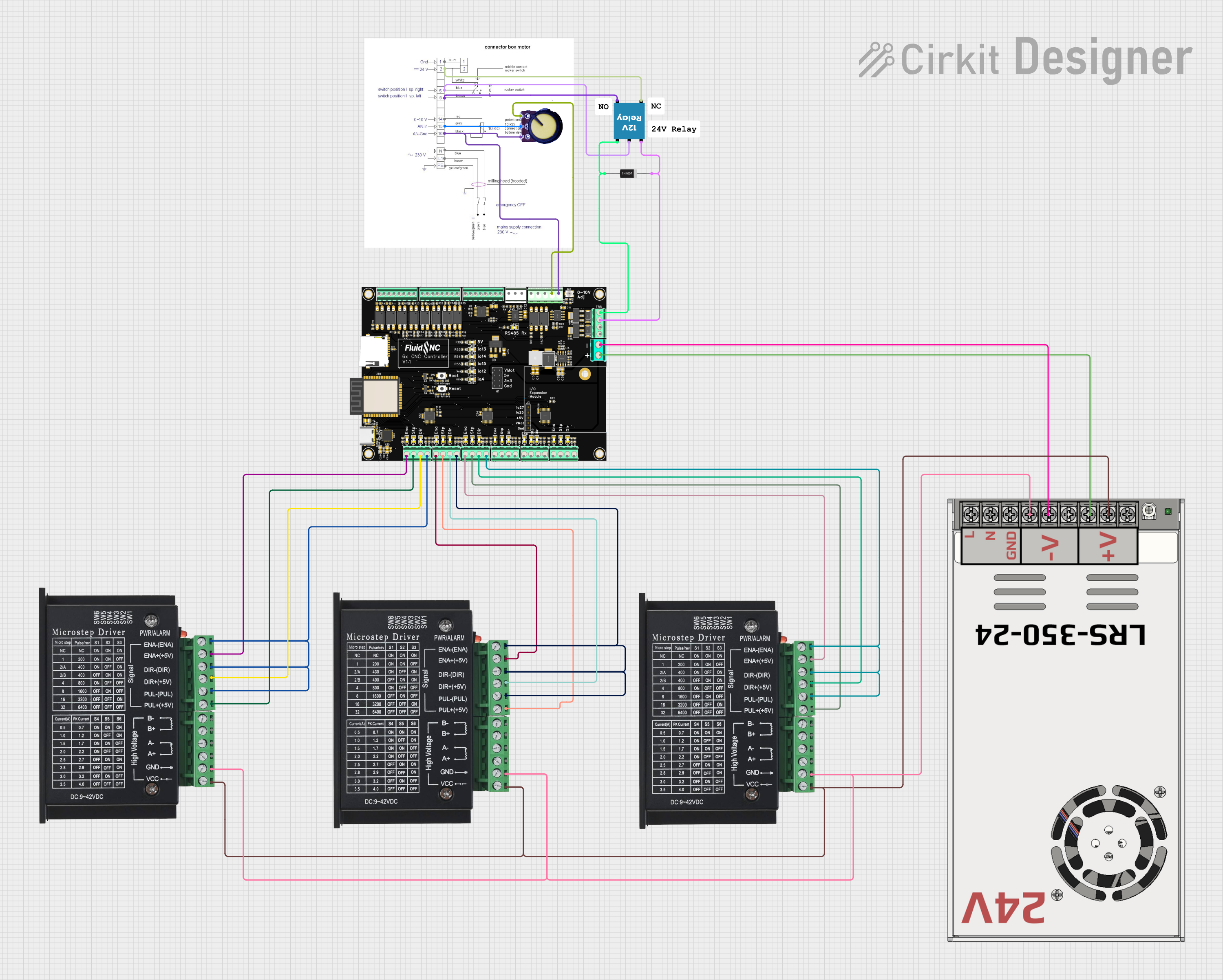
- CNC machines for high-torque and accurate positioning
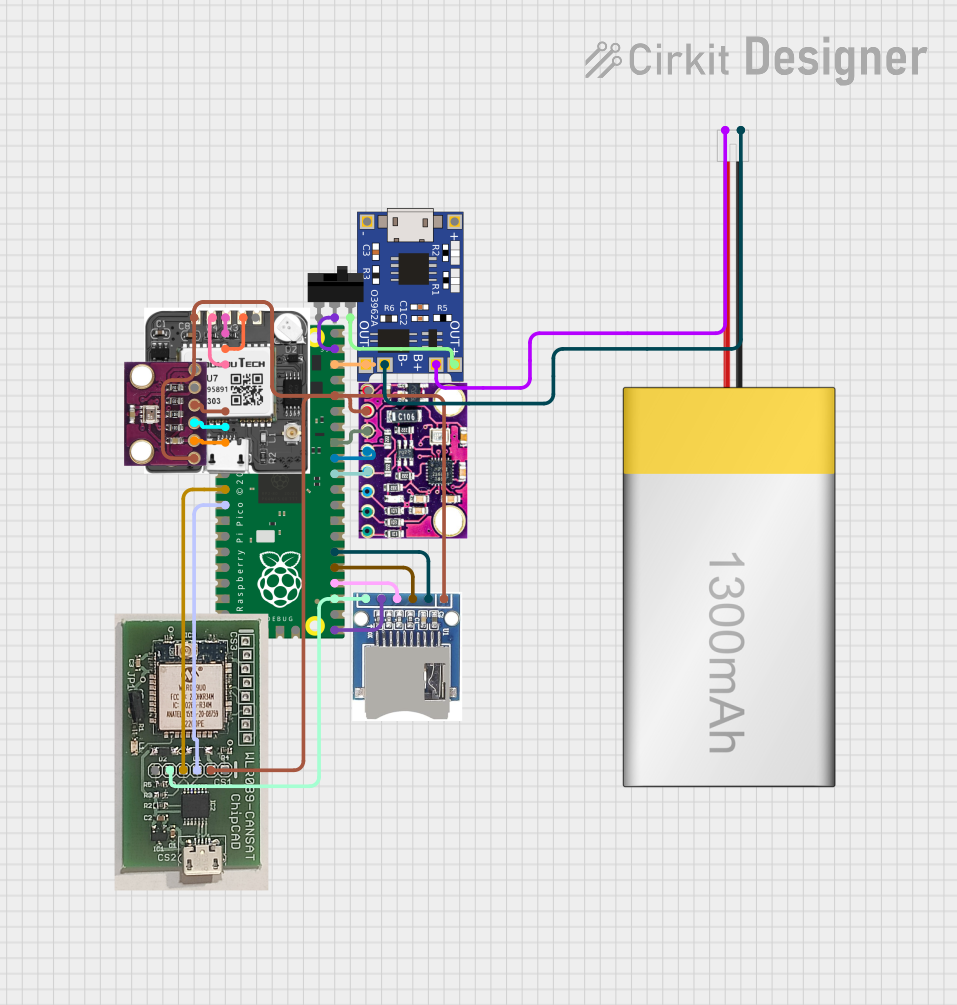
- Robotics and automation systems
- Laser cutters and engravers
- Any application requiring quiet and efficient stepper motor operation
Technical Specifications
The TMC 2209 offers a range of features and specifications that make it suitable for demanding applications. Below are the key technical details:
Key Specifications
| Parameter | Value |
|---|---|
| Operating Voltage Range | 4.75V to 29V |
| Maximum Motor Current | 2.0A RMS (2.8A peak) |
| Microstepping Resolution | Up to 256 microsteps per step |
| Communication Interface | UART |
| Logic Voltage | 3.3V or 5V compatible |
| Features | StealthChop2, SpreadCycle, |
| CoolStep, StallGuard4 |
Pin Configuration
The TMC 2209 is typically available in a 28-pin package. Below is the pinout description:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | GND | Ground |
| 2 | VM | Motor power supply (4.75V to 29V) |
| 3 | VCC_IO | Logic voltage input (3.3V or 5V) |
| 4 | ENN | Enable input (active low) |
| 5 | DIR | Direction control input |
| 6 | STEP | Step pulse input |
| 7 | UART | UART communication pin |
| 8 | MS1 | Microstep resolution selection (MS1) |
| 9 | MS2 | Microstep resolution selection (MS2) |
| 10 | DIAG | Diagnostic output |
| 11 | INDEX | Microstep index output |
| 12 | GND | Ground |
| 13-28 | Motor Pins | Connections to the stepper motor coils (A1, A2, |
| B1, B2) |
Usage Instructions
The TMC 2209 can be used in a variety of circuits to drive stepper motors. Below are the steps and best practices for using the TMC 2209 effectively:
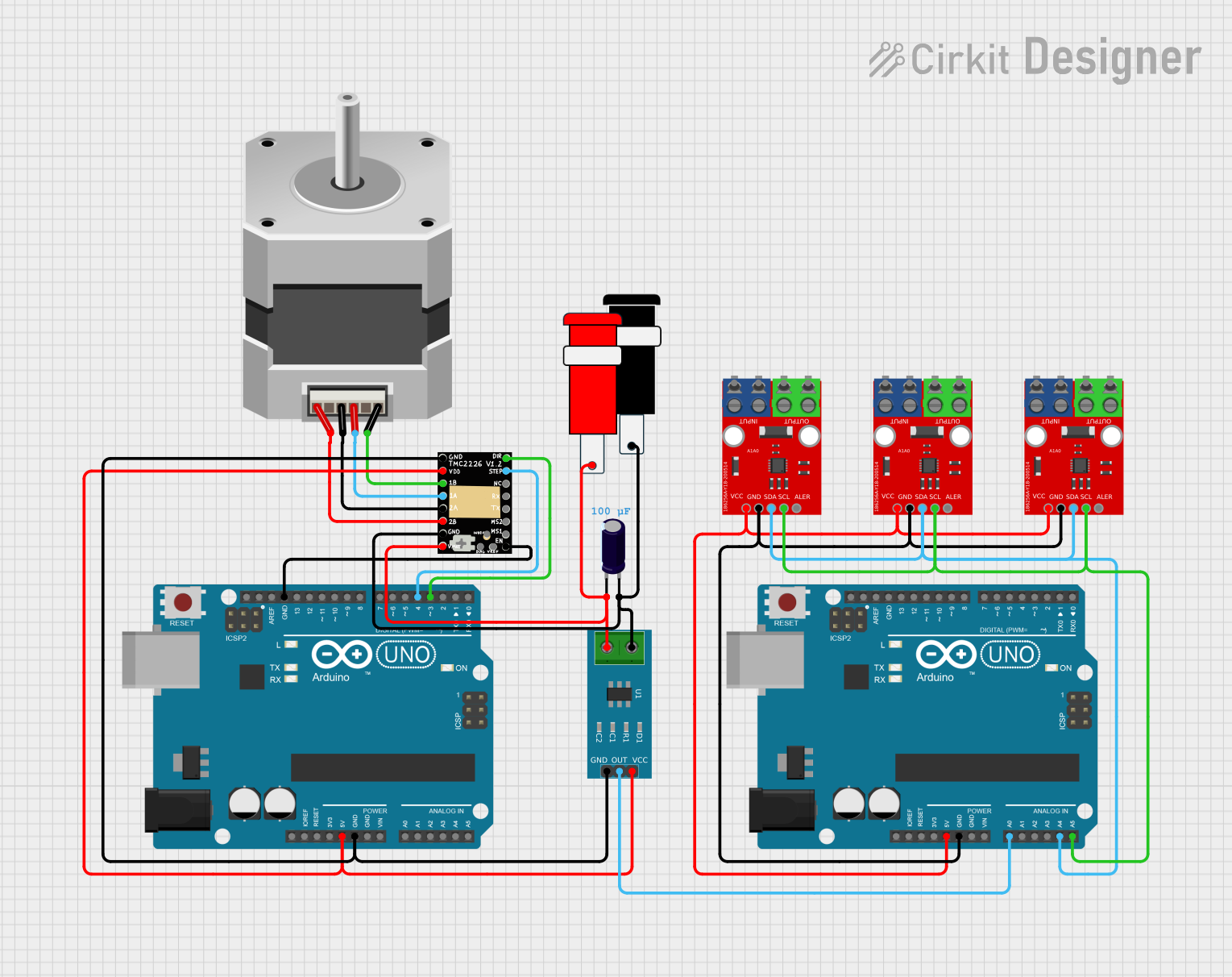
Basic Circuit Setup
- Power Supply: Connect the motor power supply (VM) to a voltage source within the range of 4.75V to 29V. Ensure the power supply can handle the current requirements of your stepper motor.
- Logic Voltage: Connect the VCC_IO pin to a 3.3V or 5V logic voltage source, depending on your microcontroller.
- Motor Connections: Connect the stepper motor coils to the motor pins (A1, A2, B1, B2) as per the motor's datasheet.
- Control Pins: Connect the STEP, DIR, and ENN pins to the corresponding control pins on your microcontroller.
- UART Communication: If using UART for advanced features, connect the UART pin to the microcontroller's UART TX/RX pins.
Arduino UNO Example Code
Below is an example of how to control the TMC 2209 using an Arduino UNO:
#include <TMCStepper.h>
// Define pins for TMC 2209
#define EN_PIN 8 // Enable pin
#define DIR_PIN 5 // Direction pin
#define STEP_PIN 2 // Step pin
#define SERIAL_PORT Serial // UART port for communication
#define DRIVER_ADDRESS 0b00 // TMC2209 driver address (set via MS1/MS2)
// Initialize TMC2209 driver
TMC2209Stepper driver(&SERIAL_PORT, DRIVER_ADDRESS);
void setup() {
pinMode(EN_PIN, OUTPUT);
digitalWrite(EN_PIN, LOW); // Enable the driver (active low)
SERIAL_PORT.begin(115200); // Initialize UART communication
driver.begin(); // Initialize the driver
driver.toff(5); // Enable driver in SpreadCycle mode
driver.rms_current(800); // Set motor current to 800mA RMS
driver.microsteps(16); // Set microstepping to 1/16
pinMode(DIR_PIN, OUTPUT);
pinMode(STEP_PIN, OUTPUT);
}
void loop() {
digitalWrite(DIR_PIN, HIGH); // Set direction
for (int i = 0; i < 200; i++) { // Move 200 steps
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(500); // Step pulse width
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(500);
}
delay(1000); // Wait 1 second before reversing direction
digitalWrite(DIR_PIN, LOW); // Reverse direction
for (int i = 0; i < 200; i++) {
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(500);
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(500);
}
delay(1000);
}
Best Practices
- Use adequate heat dissipation (e.g., heatsinks) to prevent overheating.
- Ensure proper decoupling capacitors are placed near the VM and VCC_IO pins.
- Use shielded cables for motor connections to reduce electromagnetic interference.
- Configure the microstepping and current settings according to your motor's specifications.
Troubleshooting and FAQs
Common Issues
Motor Not Moving:
- Check the power supply connections and ensure the voltage is within the specified range.
- Verify the STEP and DIR signals from the microcontroller.
- Ensure the ENN pin is set to LOW to enable the driver.
Overheating:
- Ensure proper cooling with heatsinks or active cooling.
- Reduce the motor current using the
rms_current()function.
No UART Communication:
- Verify the UART connections and ensure the correct baud rate is set.
- Check the driver address and ensure it matches the hardware configuration.
Motor Vibrations or Noise:
- Enable StealthChop2 mode for silent operation.
- Check the motor wiring for loose connections.
FAQs
Q: Can the TMC 2209 be used without UART?
A: Yes, the TMC 2209 can operate in standalone mode using the STEP/DIR interface. However, UART is required for advanced features like sensorless homing and current configuration.
Q: How do I enable sensorless homing?
A: Sensorless homing requires configuring the StallGuard4 feature via UART. Refer to the TMC 2209 datasheet for detailed instructions.
Q: What is the maximum microstepping resolution?
A: The TMC 2209 supports up to 256 microsteps per step, providing extremely smooth motor operation.
Q: Can I use the TMC 2209 with a 12V or 24V power supply?
A: Yes, the TMC 2209 supports a wide voltage range of 4.75V to 29V, making it compatible with 12V and 24V systems.